¶ 软件简介
SLAM GO POST为与飞马手持激光扫描仪配套的PC端软件,内嵌在无人机管家专业版中。该软件支持处理飞马全系列手持激光扫描仪所采集的数据。融合行业级高精度建图算法,可生产高精度、高精细度的彩色点云成果及全景图成果。
软件同样支持多种点云渲染方式,包括高程、强度、纹理、透视、EDL等模式,并可按采集轨迹进行自动漫游展示。多样化的量测功能,支持点、线、面等多种方式的测量输出。其简洁的界面分布,引导式的工程创建,结合一键式的处理流程,便于客户快速掌握。
¶ 配置需求
¶ 显卡驱动适配性
目前赋色需要使用到支持12.x以上的CUDA驱动版本,请更新显卡驱动。
针对1650的显卡,请驱动升级到至少32.0.xxxx版本。
¶ 硬件配置需求
| 项目 | 最低配置 | 推荐配置 | 说明 |
| CPU | x86_64架构芯片即可 | Intel 13代8核心 | AMD,INTEL, 或 支持x86_64的国产芯片 |
| GPU | 英伟达2060及其以上 | 英伟达4060 | 只支持英伟达显卡,cuda驱动支持12.1 以上版本 |
| 内存 | 16GB | 64GB | 建议32GB及其以上 |
¶ 软件安装
SLAM GO POST软件为依托于无人机管家主模块的附属模块,需要优先安装飞马无人机管家软件。通过访问以下网站可获取软件安装包。
飞马无人机管家软件下载链接如下:
https://feimarobotics.com/zhcn/productSupportDetail?name=uavmanager
主模块安装完毕后,通过桌面快捷方式打开。打开SLAM应用模块,点击下载,下载SLAM应用程序组即可。
下载完毕后,单击SLAM GO POST应用即可。
¶ 软件组成
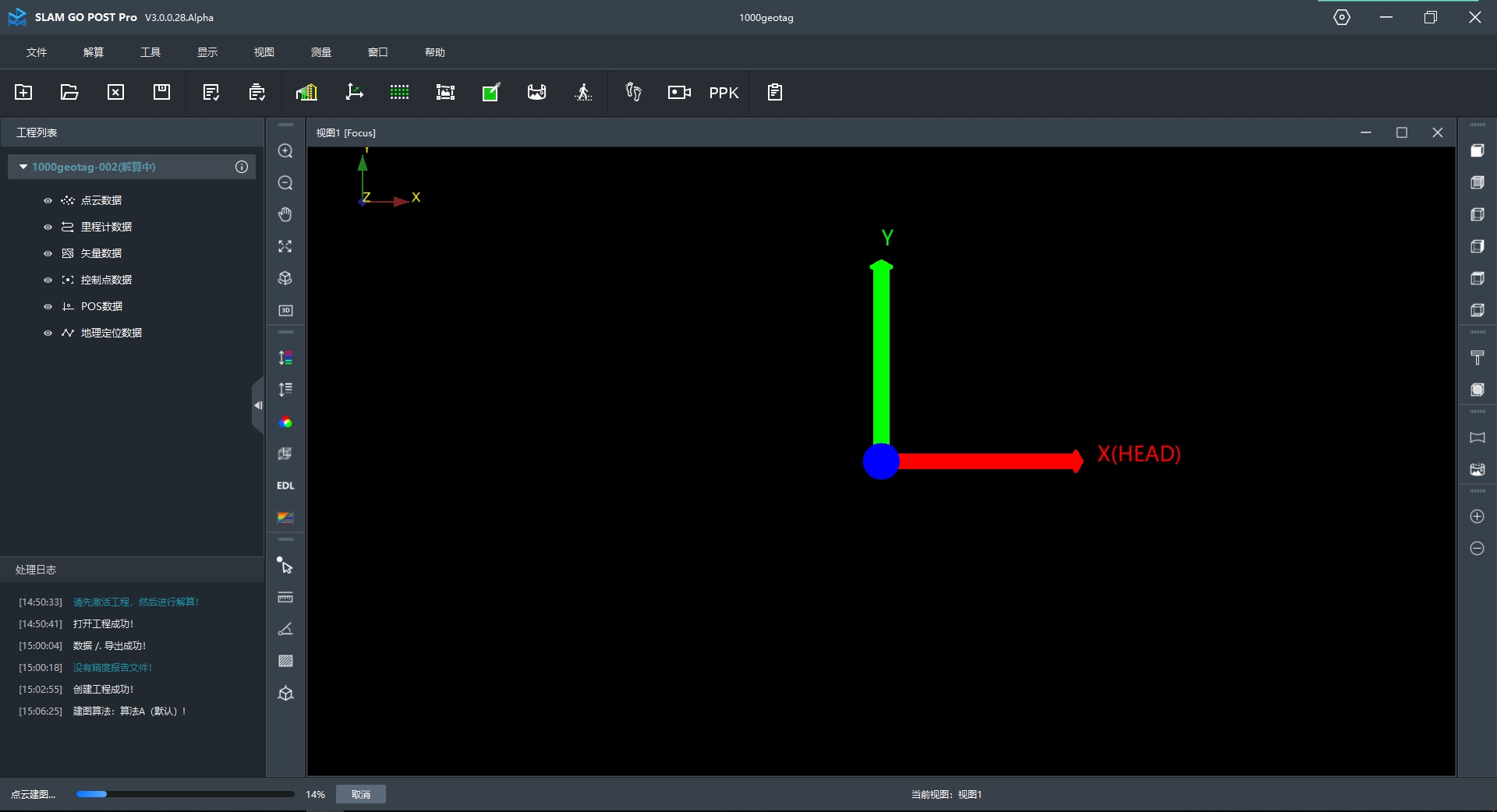
¶ 菜单栏
位于软件界面最上方的菜单栏,涵盖SLAM GO POST Pro所有的功能和设置内容,分为文件、解算、工具、显示、视图、测量、窗口、帮助。

¶ 常用工具栏
位于软件界面上方的工具栏,涵盖常用的功能。主要实现工程相关、数据处理功能、基础的视图漫游、部分常用工具。

常用工具栏除LOG查看工具外,其余全部与菜单栏中同名功能使用方式一致,可在本手册中【菜单栏】中具体功能对应位置寻找。
¶ LOG
查看激活工程最新的log文件,具体log文件保存在工程路径\log文件夹中。
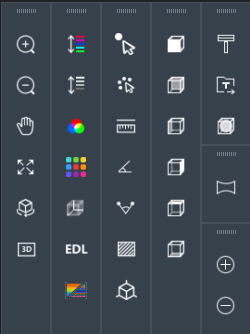
¶ 快捷工具条
快捷工具条位于视图窗口左、右两边,包括操作、视图、渲染、测量、裁切盒、全景图、点大小设置等工具条。可通过鼠标左键拖动各组件位置,也可通过鼠标右键控制各工具条组件的显隐状态。
¶ 工程列表窗口
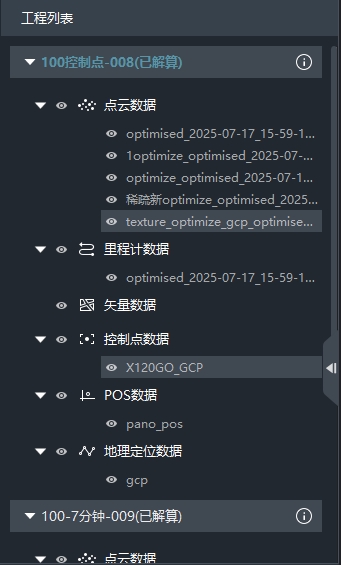
工程列表窗口中显示当前已打开的工程列表。并逐工程显示其包含的数据目录。
工程列表窗口中工程名称文字显示为蓝色的为当前可执行操作的工程,即为激活状态;显示为白色的,则为未激活状态,即不可执行操作的工程。
注:批处理功能无此激活限制,可批处理当前打开的全部工程。
¶ 视图窗口
软件中间区域则为视图显示窗口,支持单一视图、双视图、多视图显示,主要为新建视图窗口、剖面视图、全景视图等视图窗口。
其中当前视图通过鼠标左键点击激活当前视图,剖面视图、全景视图窗口使用时与当前激活视图共同启动,分别通过【剖面】、【全景图】功能调用。
¶ 处理日志、进度条
处理日志为工程日志输出窗口,任务执行状态、成功/失败提示显示在该窗口中。
进度条位于软件左下角落,主要显示当前数据处理进度条,分为当前进度名称+总进度+总进度具体数值;

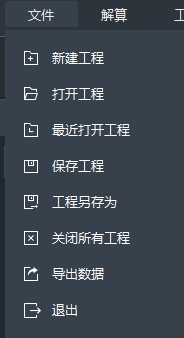
¶ 文件
【文件】菜单中包括新建工程、打开工程、最近打开工程、保存工程、工程另存为、关闭所有工程、批量导出、退出。
¶ 新建工程
创建一个新的待解算工程。
¶ 功能说明
【*数据导入】:导入待处理数据的原始数据目录,必要参数;
【工程名称】:默认为SlamProject,可按需修改工程名称;
【创建时间】:创建工程的时间;
【设备型号】:数据导入后根据原始数据中设备标定文件中记录设备型号自动识别;
【*作业模式】:数据采集时作业模式,如手持、背包等,必要参数;
【坐标系统】:如果数据中含有GNSS数据并有效时,才会出现坐标系统设置相关功能,可使用自动识别坐标系,也可通过右侧齿轮按钮打开坐标系选择页面进行坐标系选择。
【工程路径】:新建工程后存储路径位置,默认原始数据数据文件夹所在同一级文件夹中。

¶ 【坐标系选择】
- 历史坐标系:历史选择坐标系,可点击应用按钮应用坐标系,也可在列表中删除修改坐标系;
- 用户自定义坐标系:通过新建按钮新建自定义坐标系;
- 高程设置:可设置原高程模型、目标高程模型,支持手动添加高程模型;
添加高程模型方法:将高程模型tif文件放入slam-go-post.exe软件安装目录\geoids文件夹下,重新启动软件即可)
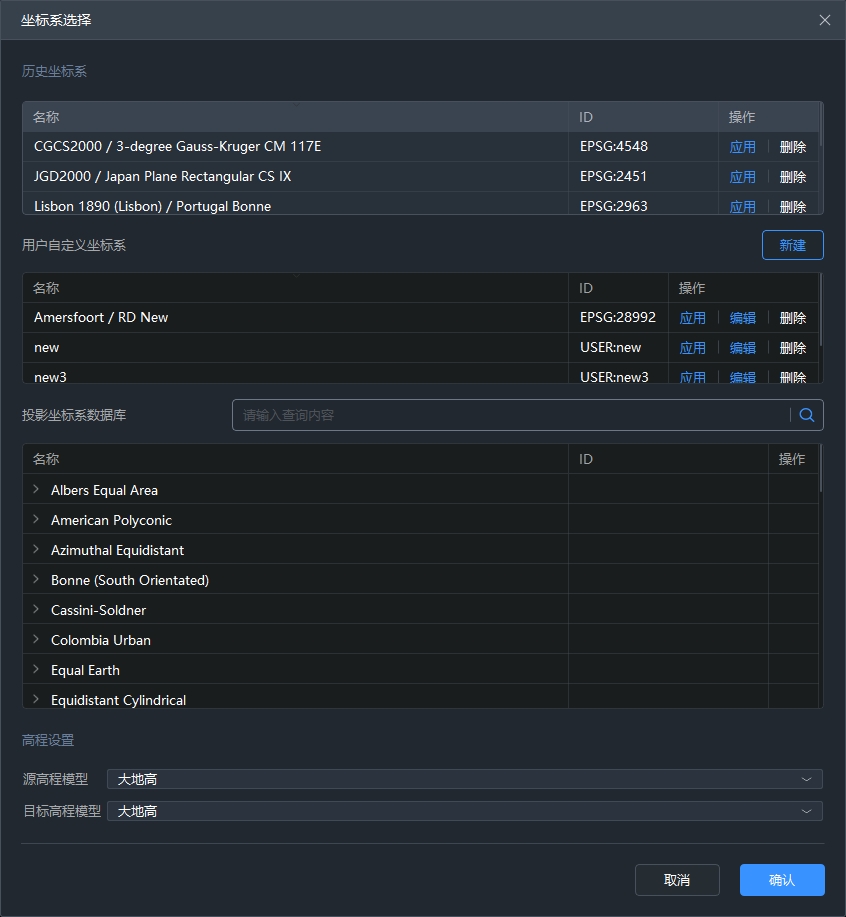
新建坐标系:输出新建坐标系名称、选择已有椭球或者新建自定义椭球、投影方式,以及投影方式对应参数设置。

自定义椭球:输入椭球相关参数新建自定义椭球。

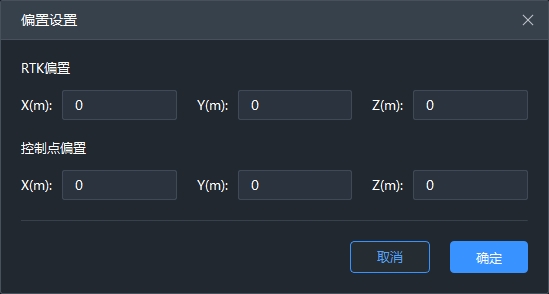
¶ 【作业模式-用户自定义模式、偏置设置】

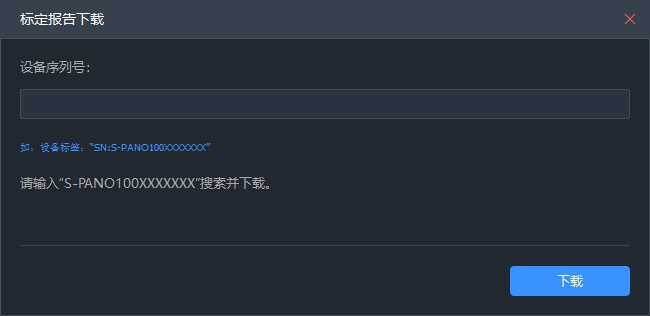
¶ 【作业模式-Pack100+Pano100模式、标定文件下载设置】
输入Pano100设备设备号点击下载即可下载。

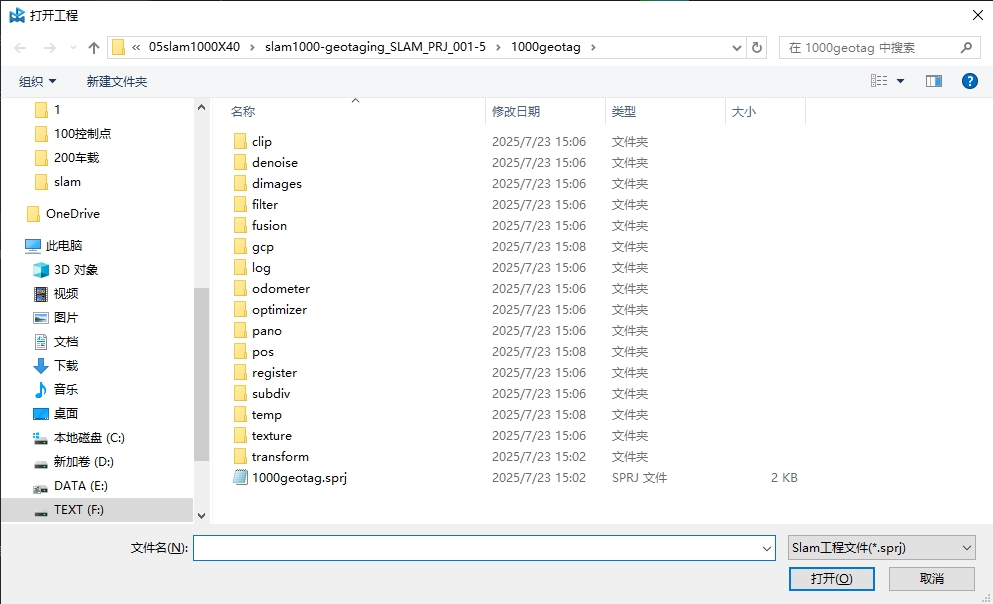
¶ 打开工程
打开一个既有工程。
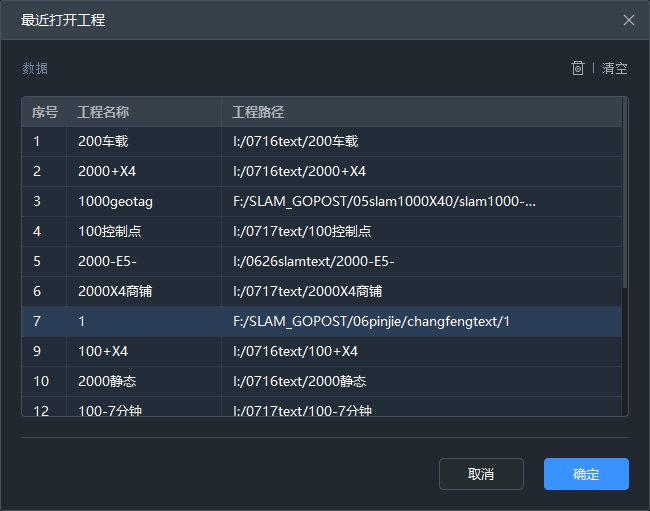
¶ 最近打开工程
包含软件最近打开的工程,双击可直接打开选中工程;可通过右上角删除按钮删除选中工程记录,清空按钮删除列表中全部工程记录。
¶ 保存工程
保存当前所打开的全部工程。
¶ 工程另存为
将当前激活工程另存。
¶ 关闭所有工程
关闭当前打开的全部工程。
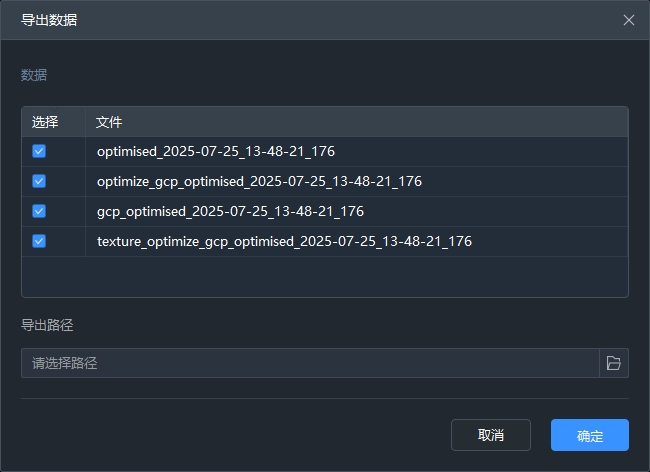
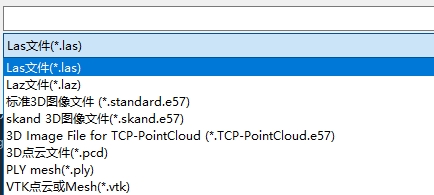
¶ 导出数据
导出当前激活工程的数据,导出格式为.las,导出结果存储在选择的导出路径中。
¶ 退出
退出并关闭软件。
¶ 解算
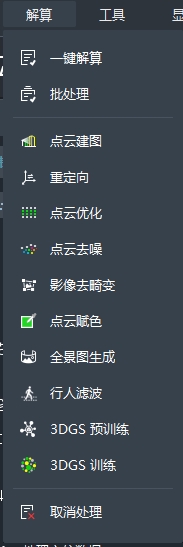
【解算】菜单中包括一键处理、批处理、点云建图、重定向、点云优化、点云去噪、影像去畸变、点云赋色、全景图生成、行人滤波、3DGS预训练、3DGS训练、取消处理。
¶ 一键处理
对当前处于激活状态的工程执行一键式解算处理。

¶ 功能说明
¶ 点云建图相关
【建图算法】不同建图算法选中,分为算法A、算法B;
【场景选择】可选择一般场景、地铁场景,默认一般场景,选择地铁场景即可切换至地铁建图算法,提高地铁场景建图效果及精度。
其他设置:
【建图实时显示】在主视图窗口中实时显示点云建图过程;
【首尾同点】首尾约束设置,形成闭环消除分层;
【行人滤波】对建图后点云进行动态物体过滤去除。
高级设置:针对建图相关参数的设置按钮,点击可打开高级设置页面,该页面包含采集稳定度、指定解算时间、有效扫描范围、闭环参数设置、移动载体滤波设置参数。
- 闭环参数介绍:当建图成果在闭环处出现分层时,可通过设置参数进行优化解决,以获得更优处理效果。此参数为全局参数,其设置将适用于数据采集过程中的所有闭环检测。
【最小重叠度】:此参数定义了数据采集过程中,重复扫描路径(点)在潜在闭环处所需满足的最小点云重叠比例阈值。当程序检测到两次点云数据的重叠度达到或超过此设定值时,才会将其判定为一个有效的闭环候选对象,并尝试进行匹配处理。该值需根据实际扫描数据的情况针对性调整。
【最大搜索范围】:此参数定义了程序在闭环处允许匹配的最大空间搜索距离,会将在空间距离上小于此阈值范围内的点云或关键帧纳入闭环检测,当出现分层时,可根据实际分层大小进行设置。

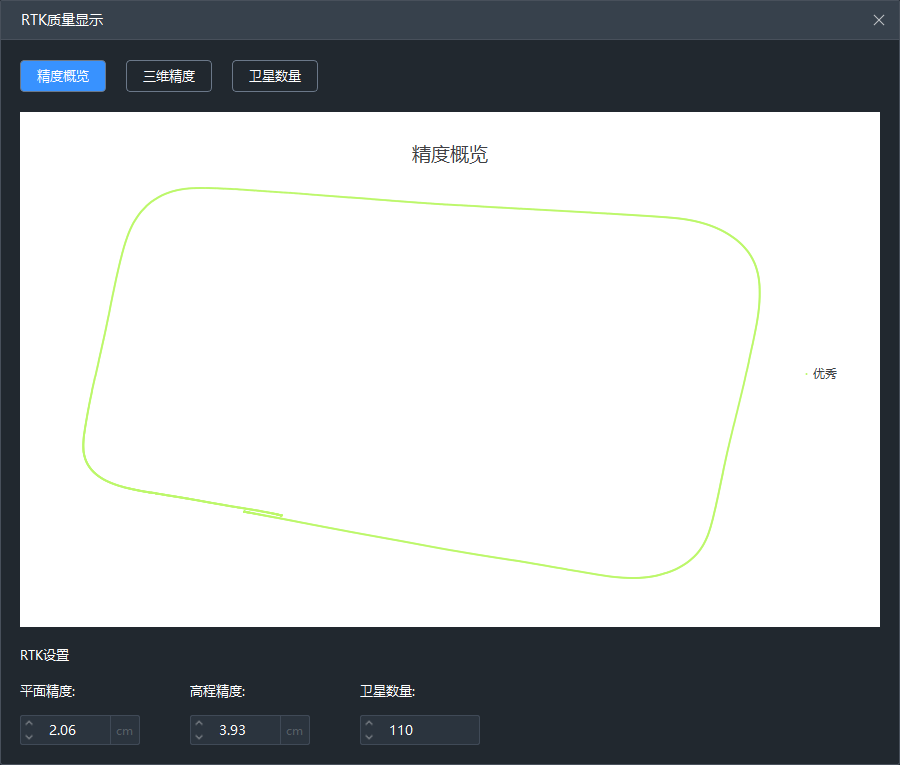
RTK质量显示:显示RTK原始质量显示,包括精度概览图、三维精度、卫星数据。也可通过RTK设置的平面精度、高程精度、卫星数量数值调整联动显示。
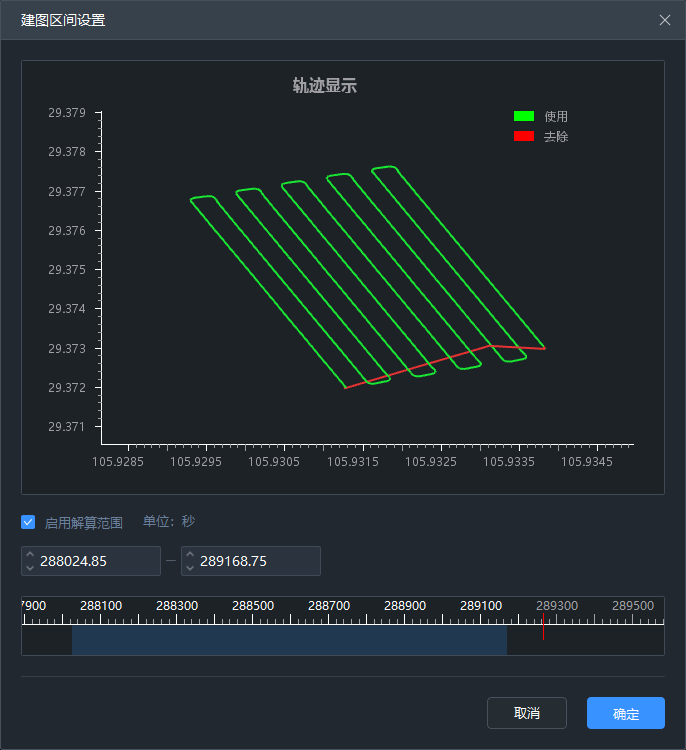
建图区间设置:有GNSS的数据可在处理前设置建图时间区间,可通过拖动时间轴或者时间数值 调整解算范围,调整解算时间范围与轨迹 可实时联动显示。
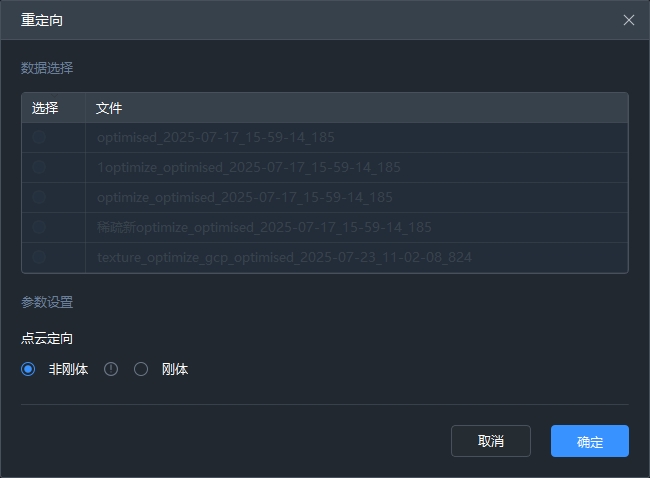
¶ 重定向、点云优化相关:
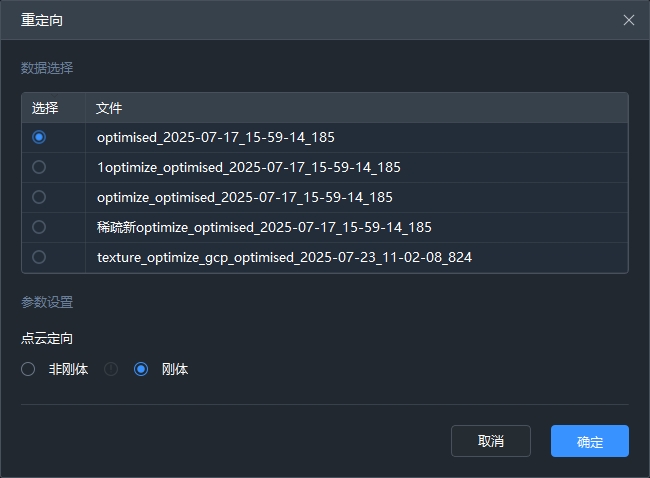
- 重定向的定向方式选择:
【刚体】基于控制点直接对解算后的点云做坐标转换;
【非刚体】基于控制点或RTK、PPK等GNSS数据优化点云并定向。
- 点云优化的优化方式选择:
可选择稀疏优化和稠密优化两种优化方式。
【稠密优化】优化成果大小保持在原数据的90%大小以上 ;
【稀疏优化】优化成果大小保持在原数据的30%大小以上 。
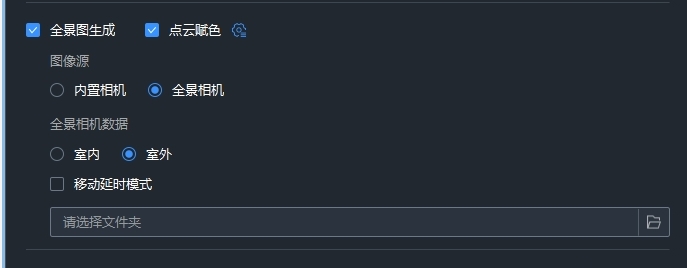
¶ 全景图和赋色的图像源设置:
【图像源】:全景图和赋色的拼接图像来源,分为内置相机和全景相机。
图像源选择全景相机,激活【全景相机相关参数】模块:
- 室内/室外:采集场景分类,按照实际情况选择,默认室外;
- 移动延时模式:如果全景相机使用移动延时模式采集,必须勾选该选项;反之不可选择。
- 全景相机数据路径选择:需要指定全景相机insv文件所在文件夹路径。
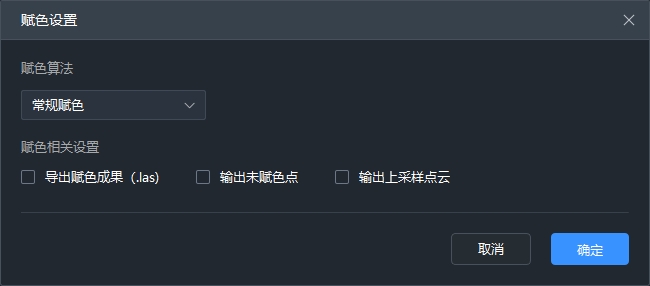
¶ 点云赋色右侧齿轮--赋色设置:
【赋色算法】分为常规赋色、高清赋色。
赋色相关设置:
【导出赋色点云】将赋色点云成果导出为标准las格式;
【输出未赋色点】是否输出未赋色的点云数据;
【输出上采样点云】赋色成果输出上采样点云,上采样结果比未采样结果大小增长6-10倍左右,相应处理时间也会增加。
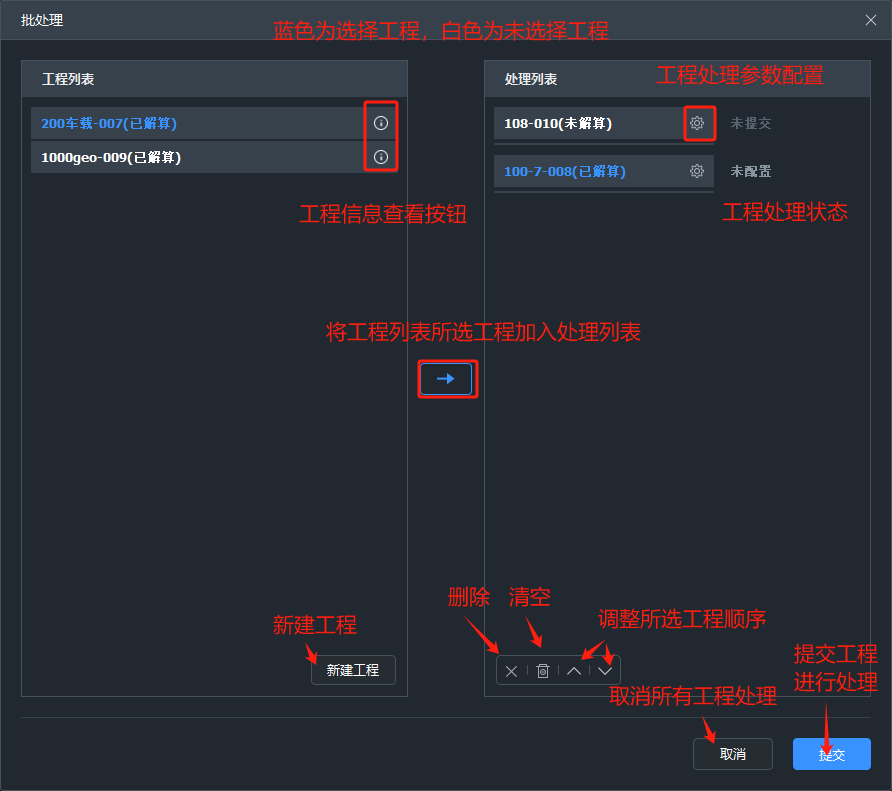
¶ 批处理
批处理工程包含以下功能:
1.【工程列表】:当前软件中未加入处理列表中的其他工程,以及新建的工程;
- 集成【新建工程】,点击下方新建工程按钮可进行工程新建,与菜单栏【文件】→【新建工程】功能一致;
- 工程列表左侧显示当前软件打开的所有工程以及新建的工程,通过工程名称右侧按钮可一键查看工程对应信息;
- 右键点击工程列表中工程可以对该工程进行编辑工程、工程另存为、保存工程、打开路径等操作。
2.【处理列表】:
- 可按需将左侧工程列表中选择的待处理工程加入右侧处理列表中,在右侧已有处理工程的情况下依然可向处理列表中加入新的工程;
- 通过处理列表框下方四个按钮:【删除】、【清空】、【上移】、【下移】,对处理列表中选择工程进行调整;
- 点击处理列表中工程名称右侧齿轮按钮,可对工程的处理参数进行配置,对应的参数配置页面与菜单栏【解算】→【一键解算】功能一致。在处理参数设置界面,点击最下方【应用】可设置当前设置工程;点击【应用全部】,可设置处理列表中所有与当前工程设备类型和采集模式一致的工程处理参数。
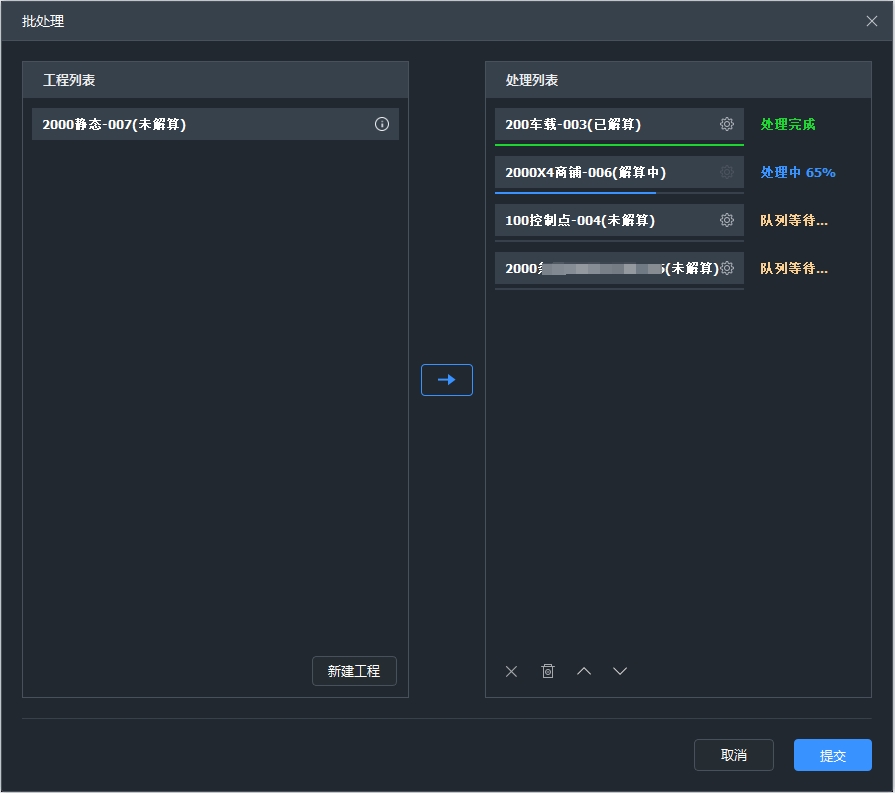
- 显示工程处理状态,处理状态包含:未配置、未提交、处理中xx%、处理完成、队列等待、处理失败等。
3.【提交】提交所有未提交工程。
4.【取消】取消所有处理任务。
5.批处理页面关闭不会影响批处理进程,可再次通过批处理功能按钮打开该页面,进行查看批处理状态或者将新的待处理工程加入批处理队列。
批处理-处理列表-处理参数配置页面示意:

批处理中状态示意:
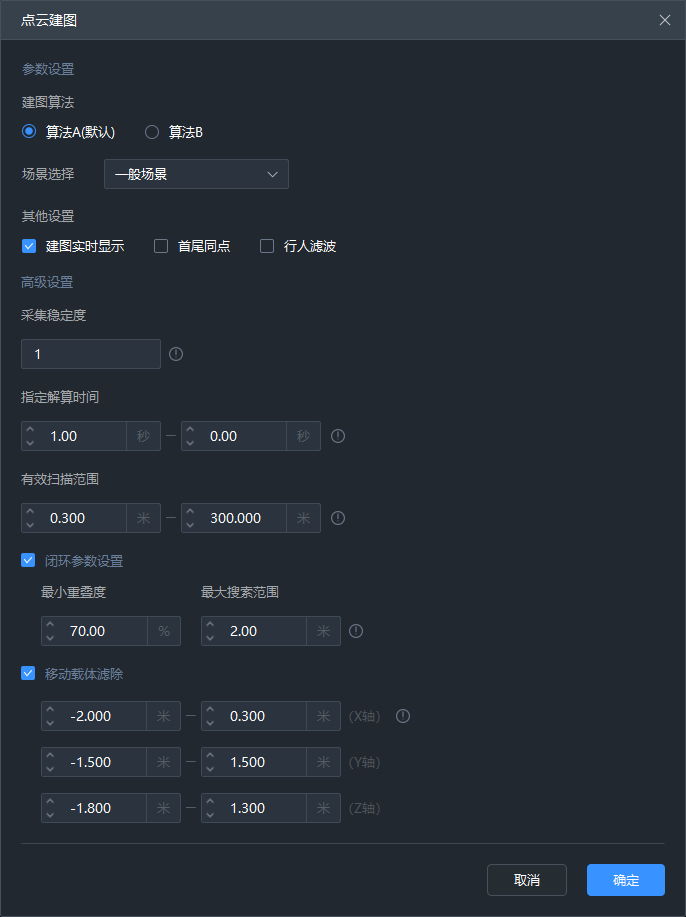
¶ 点云建图
对当前激活工程执行点云建图处理。参数同一键处理中建图相关参数。
【建图算法】不同建图算法选中,分为算法A、算法B;
【场景选择】可选择一般场景、地铁场景,默认一般场景,选择地铁场景即可切换至地铁建图算法,提高地铁场景建图效果及精度。
高级设置:针对建图相关参数的设置按钮,可以选择高级设置参数,包含采集稳定度、指定解算时间、有效扫描范围、闭环参数设置、移动载体滤波设置。
- 闭环参数介绍:当建图成果在闭环处出现分层时,可通过设置参数进行优化解决,以获得更优处理效果。此参数为全局参数,其设置将适用于数据采集过程中的所有闭环检测。
【最小重叠度】:此参数定义了数据采集过程中,重复扫描路径(点)在潜在闭环处所需满足的最小点云重叠比例阈值。当程序检测到两次点云数据的重叠度达到或超过此设定值时,才会将其判定为一个有效的闭环候选对象,并尝试进行匹配处理。该值需根据实际扫描数据的情况针对性调整。
【最大搜索范围】:此参数定义了程序在闭环处允许匹配的最大空间搜索距离,会将在空间距离上小于此阈值范围内的点云或关键帧纳入闭环检测,当出现分层时,可根据实际分层大小进行设置。
¶ 重定向
对所选点云执行点云定向处理,定向方式分为非刚性、刚性两种。
注:非刚体定向无需选择点云,默认基于建图成果处理。
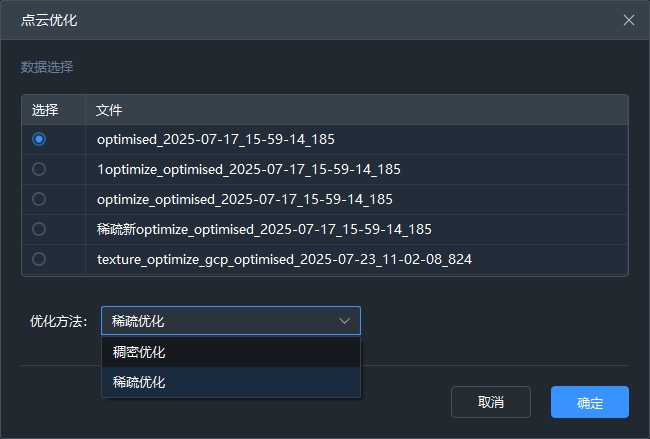
¶ 点云优化
对所选择点云执行优化处理,可选择稀疏优化和稠密优化两种优化方式。
【稠密优化】优化成果大小保持在原数据的90%大小以上
【稀疏优化】优化成果大小保持在原数据的30%大小以上
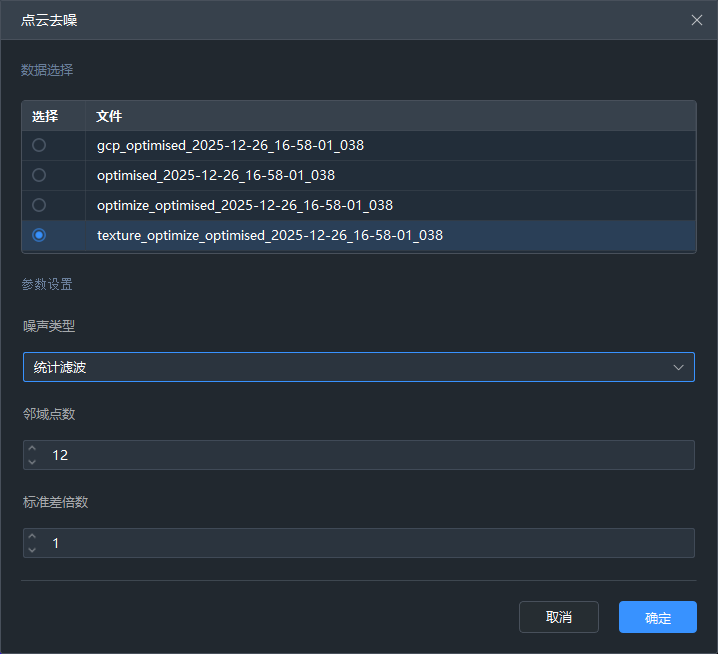
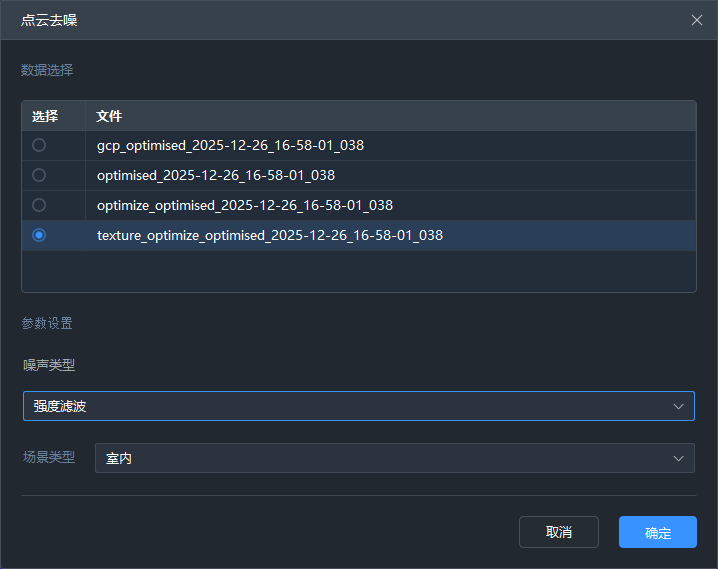
¶ 点云去噪
【统计噪声】通过统计学算法,对点云文件中的离散噪点进行过滤剔除。
【强度滤波】通过对低强度点云滤波算法,减少由于玻璃反射形成的反射噪声。
¶ 去畸变
基于出厂检校参数,对影像数据执行去畸变处理,以保证后续全景图拼接及点云赋色的效果。
SLAM2000、SLAM200、SLAM1000设备数据需在点云赋色步骤后使用该功能。
¶ 点云赋色
对所选点云执行点云赋色处理。参数同一键处理中赋色参数。
【图像源】:全景图和赋色的拼接图像来源,分为内置相机和全景相机。
图像源选择全景相机,激活【全景相机数据】模块:
- 移动延时模式:如果全景相机使用移动延时模式采集,必须勾选该选项;反之不可选择。
- 全景相机数据路径选择:需要指定全景相机insv文件所在文件夹路径。
【赋色算法】分为常规赋色、高清赋色、高清增强赋色。
常规赋色:适用于大部分范围场景;
高清赋色:清晰度较常规赋色有明显提升,适用于大部分场景;
高清增强赋色:增加了pos优化步骤,清晰度较高清赋色有明显提升,适用于需要更高清晰度的场景,处理时间会相应增加。(注:高清增强赋色模式会用到图像匹配,所以不太适合弱纹理或者重复纹理的测区)
赋色输出设置:
【输出未赋色点】是否输出未赋色的点云数据;
【输出上采样点云】赋色成果输出上采样点云,上采样结果比未采样结果大小增长6-10倍左右,相应处理时间也会增加。


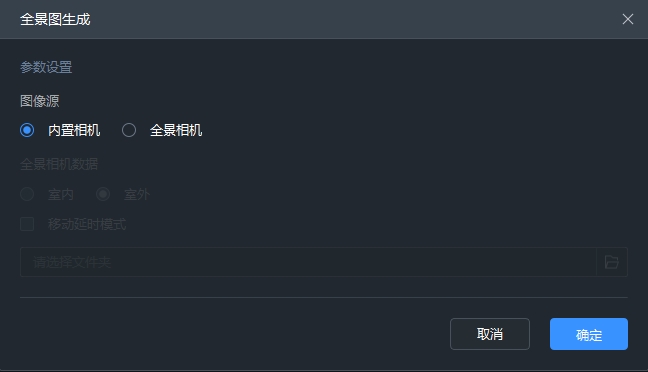
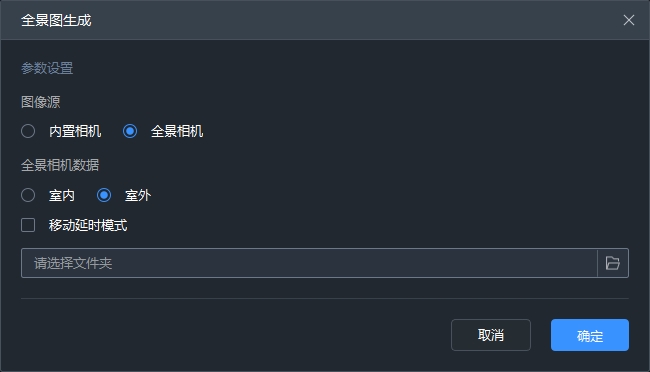
¶ 全景图生成
输出全景图拼接成果,分为内置相机和全景相机两项选项。
【图像源】:全景图和赋色的拼接图像来源,分为内置相机和全景相机。
图像源选择全景相机,激活【全景相机数据】模块:
- 室内/室外:采集场景分类,按照实际情况选择,默认室外;
- 移动延时模式:如果全景相机使用移动延时模式采集,必须勾选该选项;反之不可选择。
- 全景相机数据路径选择:需要指定全景相机insv文件所在文件夹路径。
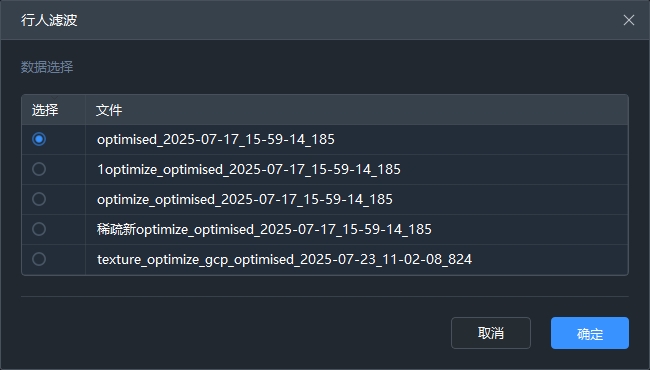
¶ 行人滤波
对选择数据进行动态物体过滤去除。
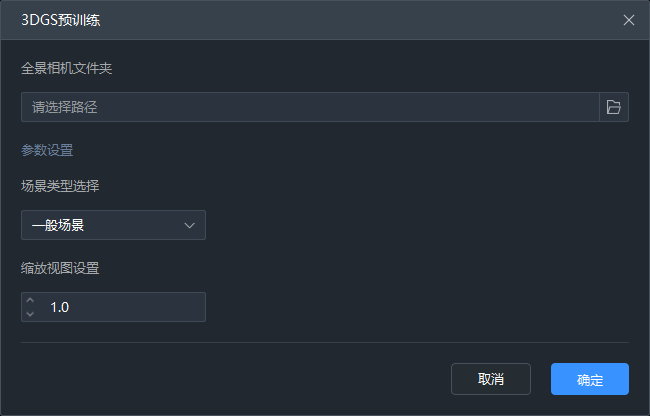
¶ 3DGS预训练
选择全景相机INSV文件所在文件夹路径后点击确认即可开始3DGS预训练.
¶ 3DGS训练
对激活工程的预训练结果进行进一步训练,分为本地训练和上传训练,具体操作可见该文档:/zh/slam/3dgs/training
¶ 取消处理
停止当前正在执行的处理步骤。
¶ 工具
【工具】菜单中包括坐标转换设置、导出XML、RINEX格式转换、PPK解算、精度报告、导出Cybergeo,点云分幅、点云拼接、点云裁切、点对配准、创建DOM、多架次拼接,以及土方量模块:体积计算、变化分析。

¶ 坐标转换设置
对当前激活工程进行坐标转换设置,该设置只对重定向步骤起效。
坐标转换设置包括五种模式:线性变换、XYMultiply、平移旋转、投影变换、四参数+高程拟合。
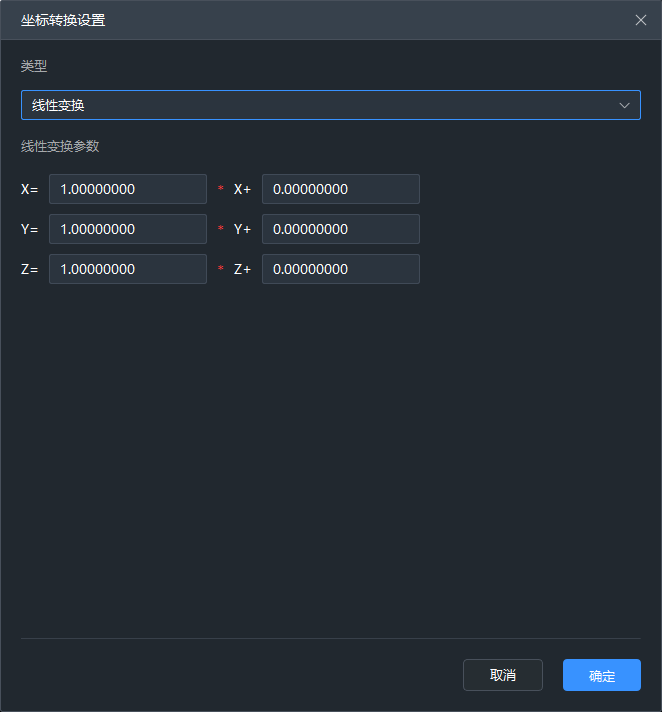
¶ 线性变换
通过简单的平移参数及缩放参数对所选点云进行坐标转换。
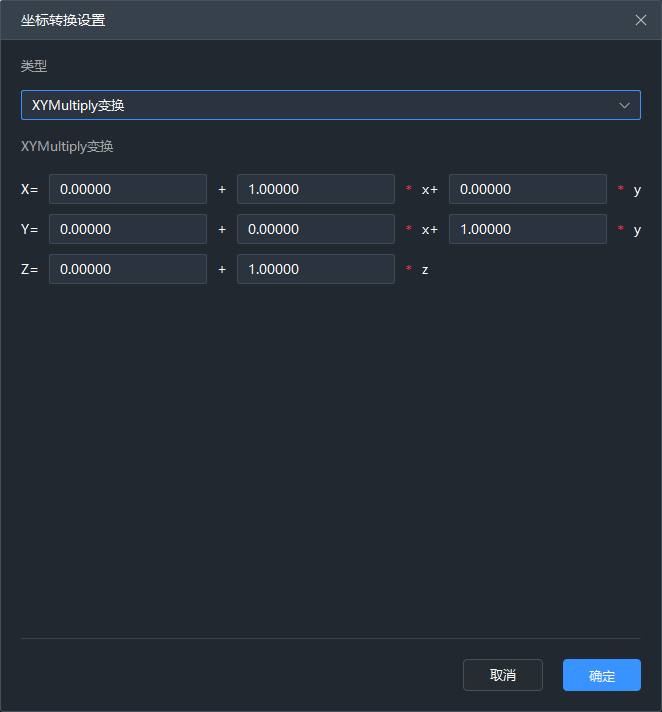
¶ XYMultiply变换
二维仿射变换参数。包含二维变换关系及高程的线性变换关系。
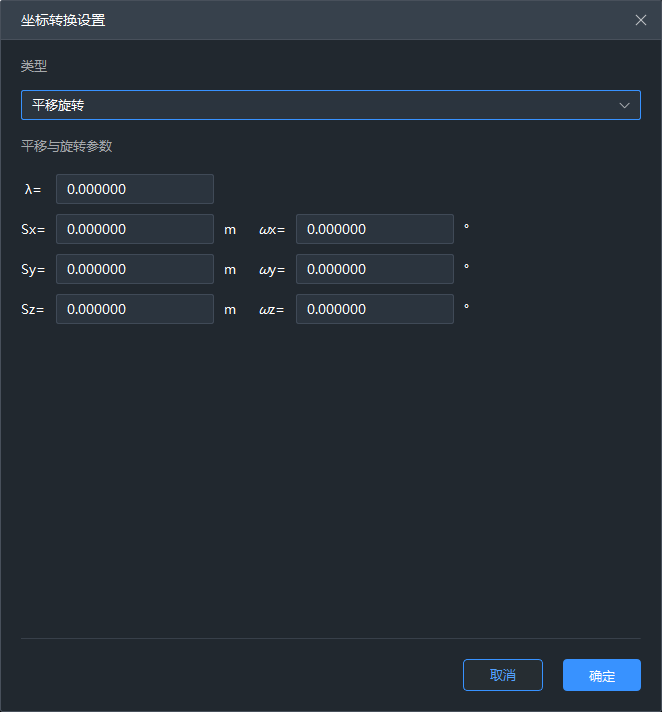
¶ 平移旋转
通过旋转、平移、尺度变化参数对当前点云进行坐标上的转换。
¶ 投影变换
对所选点云数据进行投影参数转换。支持使用布尔沙七参数进行坐标转换。
投影变换参数:
【源投影】:在工程编辑页面设置的源投影。
【目标投影】:投影变换的目标投影,下拉列表显示历史选择的目标投影,也可通过点击右侧按钮选择需要的目标投影坐标系。
【调整范围】分为调整XYZ、调整XY。
【调整XYZ】空间转换,平面、高程坐标均进行投影变换;
【调整XY】平面转换,仅对平面坐标进行投影变换。
投影转换,不使用布尔沙七参数:
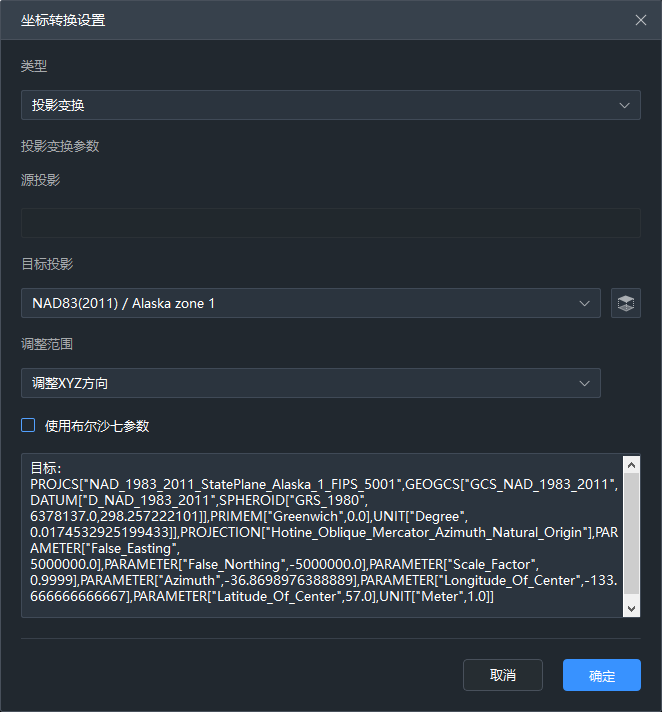
使用布尔沙七参数进行投影坐标转换,可通过点击【导入】通过已有config文件导入七参数(config文件相关说明可查看:/zh/slam/slamgopost/config):

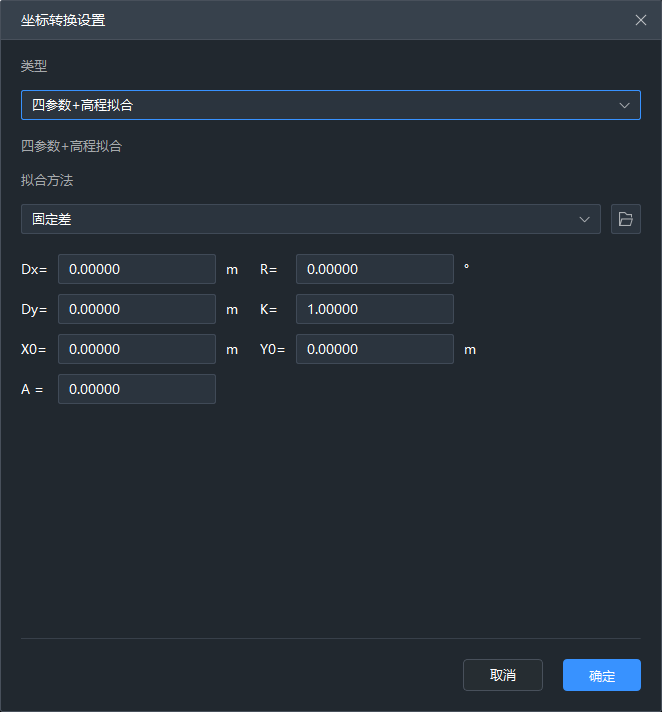
¶ 四参数+高程拟合
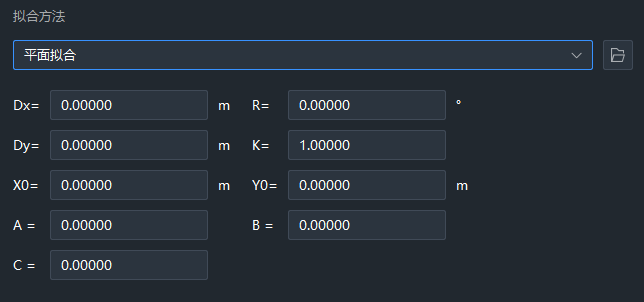
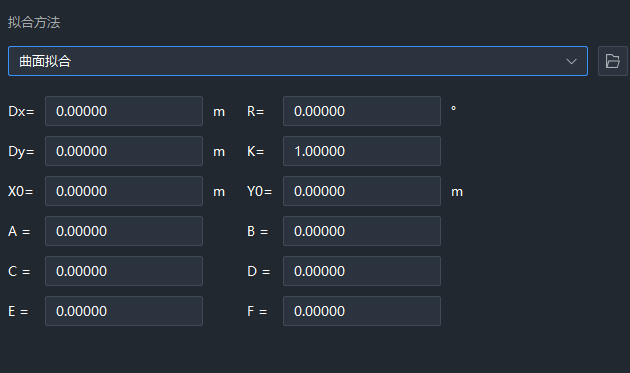
利用四参数转换点云的平面坐标,结合高程拟合改正参数,将点云高程系统转换至所需系统下。软件当前支持使用三种高程拟合方式,分别为固定差改正、平面拟合、二次曲面拟合,可通过点击拟合方法右侧文件导入按钮,通过导入已有config文件导入相关参数(config文件相关说明可查看:/zh/slam/slamgopost/config)。
固定差:通过取控制点和测量点之间的高程差平均值,作为固定的平移量。
平面拟合:通过计算多个水准点处的高程异常,生成一个最佳的拟合平面,当此平面平行于水平面时,平面拟合等同于固定差改正。
曲面拟合:将高程异常近似看作一定区域内的各坐标的曲面拟合函数,计算出曲面拟合系数,进而推算出高程异常和各点坐标之间的函数关系。
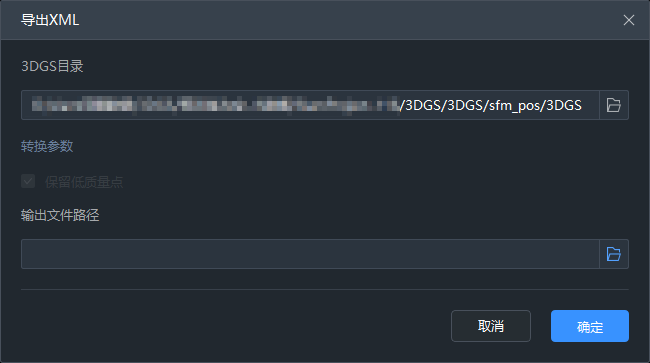
¶ 导出XML
根据3DGS预训练成果导出XML到指定输出文件路径文件夹中。
3DGS目录:可自动指定当前激活工程3DGS预训练成果目录,也支持手动指定路径,示例路径:"工程路径/3DGS/3DGS/sfm_pos/3DGS"
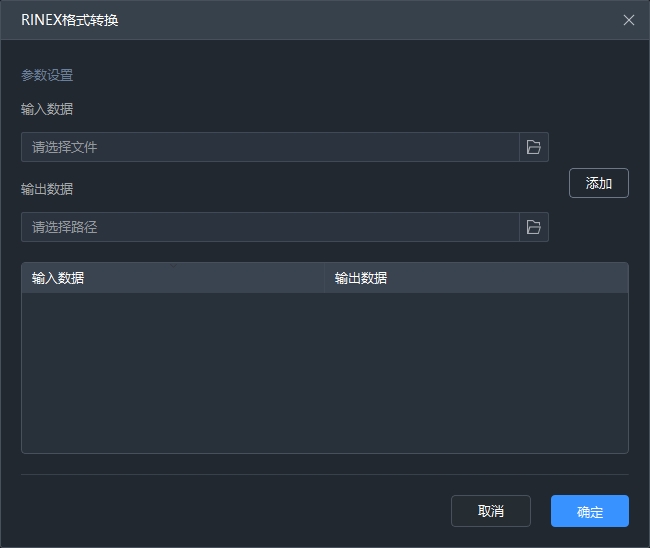
¶ RINEX格式转换
将原始观测文件转换为后差分解算所需的标准RINEX格式文件。
¶ PPK解算
通过后处理方式解算一个周期内的历元数据,从而提高固定率,解算精度更高。
当扫描测区无网络,无法链接RTK时使用。

¶ 具体参数:
【流动站数据】流动站观测数据所在路径
【基站数据】基站观测数据所在路径
基站点相关参数
- 【Rinex头信息】基站点坐标读取Rinex头文件记录信息
- 【自动】自动计算基站点坐标
- 【用户自定义】用户输入基站点坐标
- 【经度】基站点坐标经度
- 【纬度】基站点坐标纬度
- 【高度】基站点坐标高度
导航数据选择:
- 【流动站】导航文件使用流动站中记录信息
- 【基站】导航文件使用基站中记录信息
【输出路径】解算成果保存路径
¶ 精度报告
打开当前所激活工程中存在的定向精度报告,该报告存在工程路径\gcp文件夹中。

¶ 导出Cybergeo
导出选择工程的Cybergeo工程到设置的保存目录中。

¶ 点云分幅
基于标准比例尺或者固定尺寸对所选点云文件进行分幅裁切输出。
¶ 比例尺:基于标准比例尺进行分幅
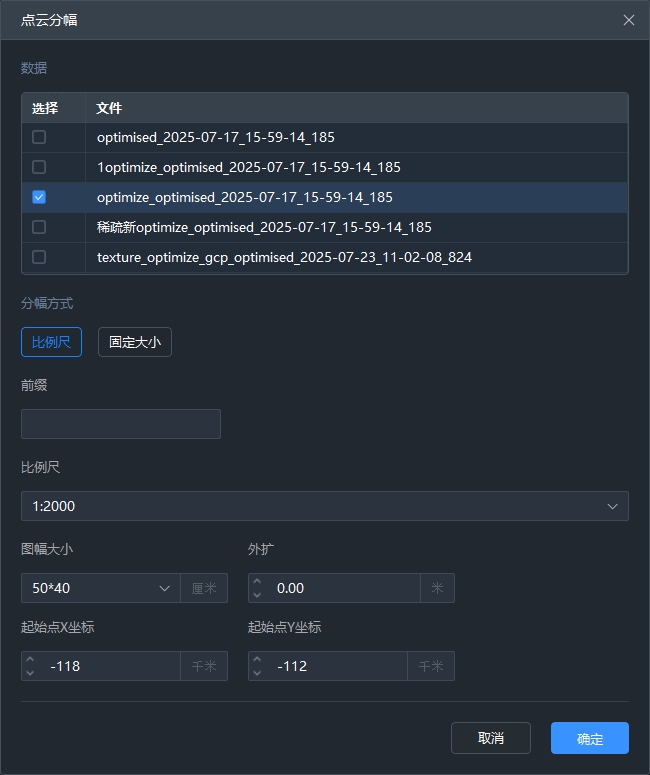
【前缀】输出分幅成果时增加的前缀文本
【比例尺】选择分幅的比例尺
【图幅大小】图幅大小选择
【外扩】分幅外扩距离
【起始点X\Y坐标】分幅起始点X\Y坐标
¶ 【固定大小】基于固定尺寸进行分幅

【前缀】输出分幅成果时增加的前缀文本
【图幅长度】分幅固定长度
【图幅宽度】分幅固定宽度
【图幅大小】图幅大小选择
【外扩】分幅外扩距离
【起始点X\Y坐标】分幅起始点X\Y坐标
¶ 点云拼接
对两组有重叠区域的点云数据,通过在其重叠区域选取同名点的方式,将配准点云坐标转换至与基准点云所一致的过程。
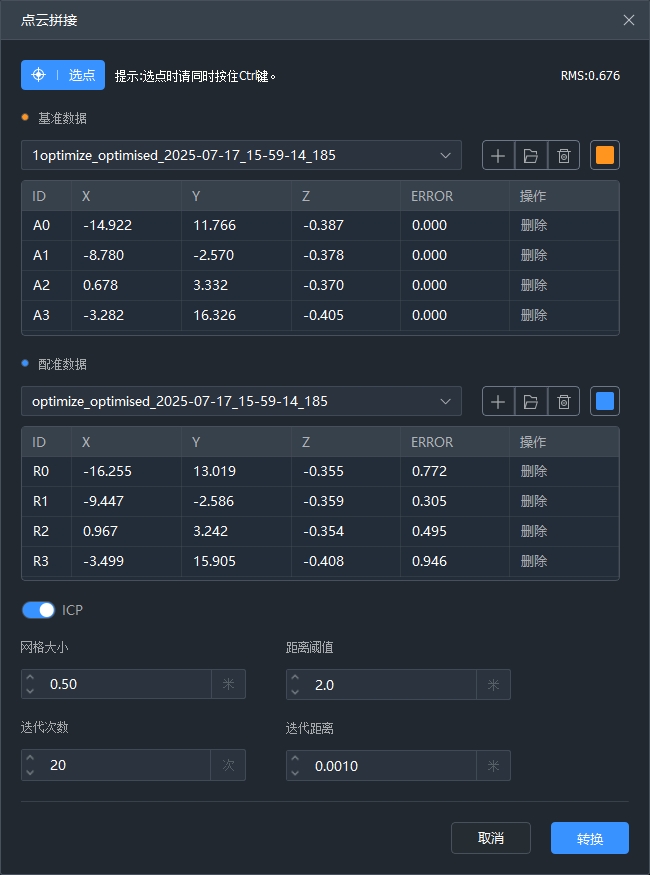
¶ 具体参数
【选点】点击该按钮后,配合同时按着键盘Ctrl键,在点云上直接选择基准数据和配准数据的对应点
【基准数据】和【配准数据】相关设置,以基准数据为例:
- 数据选择框:选择基准数据或者配准数据:

- 匹配点设置按钮,分别为:单独点坐标输入、打开文件输入、清空所有点、点云显示颜色设置
- 【删除】删除该行点
ICP相关参数设置:
- 【格网大小】采样间隔
- 【距离阈值】同名点之间的最大距离,匹配点大于该阈值时不参与计算
- 【迭代次数】ICP算法的迭代次数
- 【迭代距离】前后两次计算的距离的差值,如果小于这个值,则退出迭代
¶ 点云裁切
以导入的矢量文件为范围,对所选点云执行裁切导出。
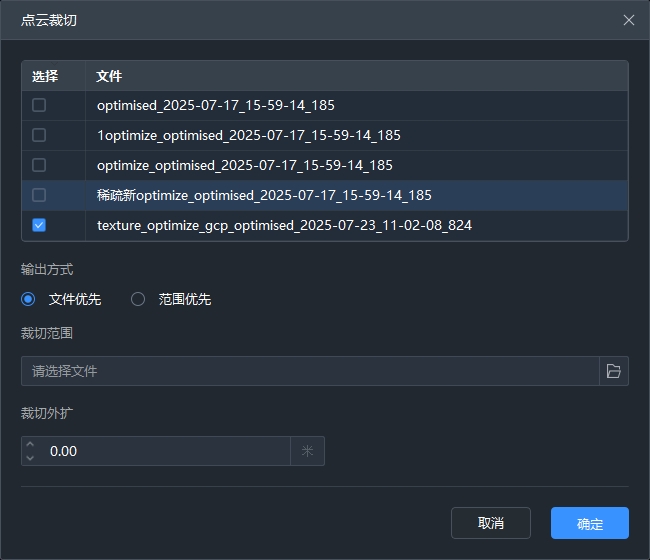
【输出方式】:
- 【文件优先】将所选点云文件与图形求交,一个点云文件会输出对应的多个图形裁切文件;
- 【范围优先】按照图形数量与所有点云数据进行裁切。
【裁切范围】:导入裁切范围矢量文件。
【裁切外扩】:裁切范围外扩距离。
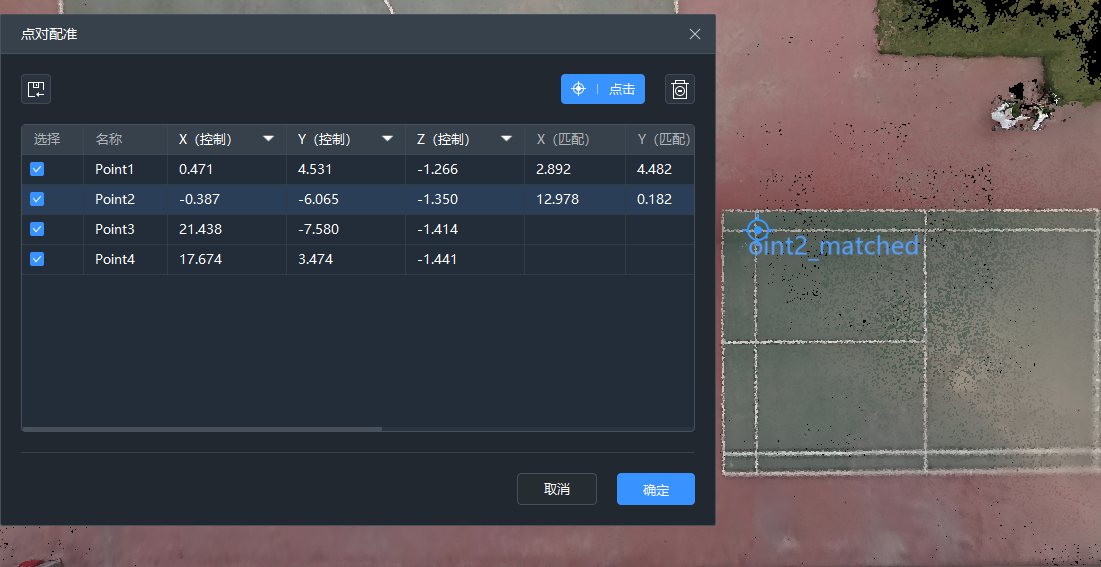
¶ 点对配准
添加已有控制点文件(.txt),并手动选择目标点云上各控制点对应位置,点击确认后开始处理。
ps:在视图中点云选点时需要点【点击】→选择控制点行→按Ctrl键同时在点云对应位置点击鼠标左键。
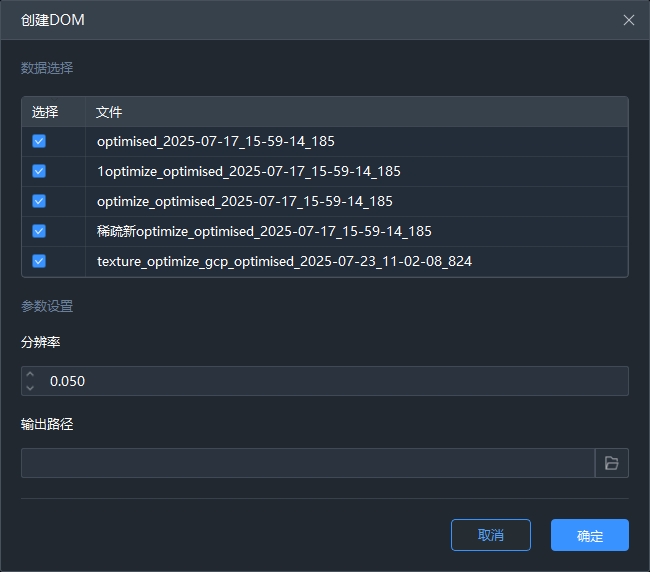
¶ 创建DOM
按照选择分辨率,对所选点云执行DOM生成,成果生成在选择的输出路径中,默认输出的DOM格式为tif。
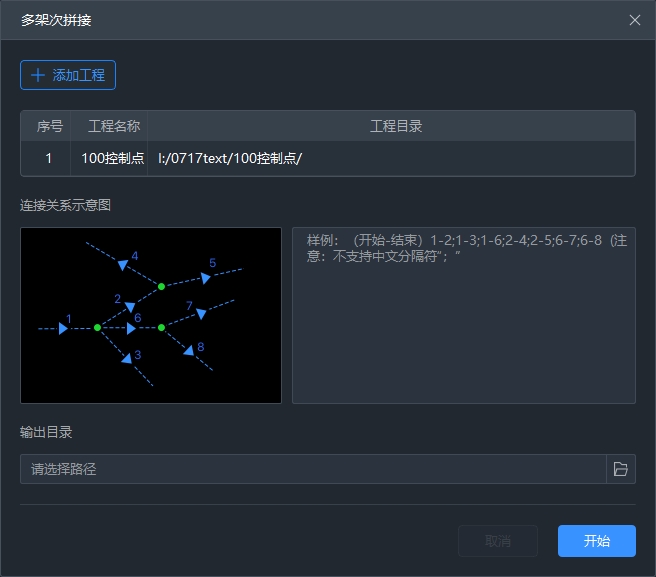
¶ 多架次拼接
对已打开工程和手动添加的工程进行拼接处理。
具体操作详情可参考该文档:/zh/slam/slamgopost/stitching_guide
如待处理工程均有定向后成果,可跳过连接关系示意图和连接关系情况输入;
如待处理工程存在未定向后成果,则需填写各工程实际连接关系情况。
¶ 体积计算
体积计算功能可支持计算所画范围的土方量,并导出多个计算报告;
体积计算包括计算参数设置、结果显示、计算区域缩略显示、进度条、棚顶去除、报告导出功能。
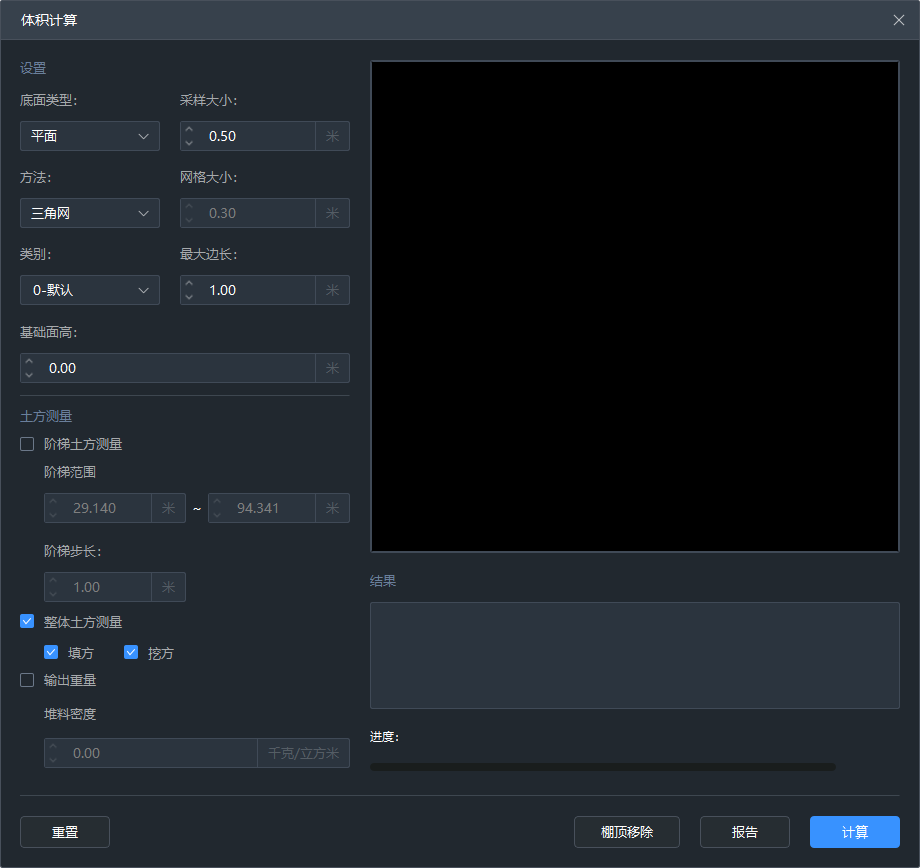
¶ 具体参数:
【底面类型】底面类型分为平面、拟合平面和复杂曲面。
- 当选择平面时,需要输入【基础面高】值,软件将以输入的基础面高值作为基准计算填挖方量。
- 当选择拟合平面时,在软件界面会有拟合坐标数据显示和操作功能按钮,需要添加拟合平面的坐标值,选择添加点按钮,按住Ctrl键,在原始点云上点击添加坐标值,坐标值会在对话框中显示。在级联界面可以对添加的拟合坐标数据进行删除和清空操作,并可通过手动输入坐标值的方式添加拟合坐标。
- 当选择复杂曲面时,需要输入DEM数据,DEM数据支持*.tif和*.tiff两种格式。
【采样大小】采样大小可以设置计算土方量时的采样间隔,采样间隔越小,体积计算越精确,但过小的采样间隔会造成计算效率变差。
【方法】计算方法可以选择三角网法或者方格网法。选择三角网法时,可以直接启动计算;选择方格网法时,需要设置网格大小,
【网格大小】方法选择方格网法时启动设置网格大小,网格大小设置依据原始数据精度和计算要求设置。
【类别】类别设置可以依据点云数据的分类类别来计算土方量。若点云数据没有分类,则默认选择【0-默认】;若点云有分类信息,则选择需要的类型来计算。
【最大边长】当绘制的边界或者点云边界为凹多边形,会造成体积计算值失真;最大边长用于凹多边形计算,以获得精确的体积。最大边长需要大于2倍的采样大小。
【阶梯土方测量】:阶梯计算需要设置阶梯范围和阶梯步长,软件将计算阶梯基准面内的填方量和挖方量。
【整体土方测量】:可通过勾选对整体土方测量的填方、挖方测量进行自定义结果输出。
【输出重量】输入计算物体重量,软件将计算土方重量。
【结果】对话框里,可以显示计算结果,计算结果可为绘制范围区块的面积、填方量和挖方量。当勾选阶梯范围时,显示每段阶梯的范围值和填挖方量。
【成果浏览】鼠标放在右侧的显示对话框里面,可以操作计算区域的显示。滑动鼠标滚轮可以放大或者缩小,按住左键移动可以旋转显示视角,按住鼠标滚轮可以平移显示对象。
【报告】点击【报告】按钮可以导出土方量计算的*.pdf报告,报告提供区块、范围、表面积、投影面积、填方量、挖方量、总体积、总重量和计算区域缩略图。
¶ 变化分析
变化分析功能可以计算分析两期变化方量。
体积变化分析界面包括数据选择、设置、结果显示、计算区域缩略显示和报告导出功能。体积变化分析时,附有计算进度条显示。

¶ 具体参数
- 【数据】包括【基础数据】和【变化后数据】。点云数据支持直接从已有工程中勾选。点云数据支持直接从已有工程中勾选
- 【设置】计算设置需要设置点云类别、网格大小、采样大小、最大边长,这四项参数与体积计算对应参数一致。
- 结果显示、成果浏览和报告导出这三项操作与体积计算一致。
¶ 显示
【显示】菜单中包括各种点云渲染模式;点云漫游模式:自主漫游、视频漫游;剖面、裁切盒、全景图显示。

¶ 渲染
将视图内点云以所选方式进行渲染显示。
¶ 高程渲染
对视图内点云以高程数值变化进行渲染显示。
¶ 强度渲染
对视图内点云以强度属性变化进行渲染显示。

¶ 纹理渲染
对视图内点云以RGB颜色属性进行渲染显示,仅对赋色后点云生效。
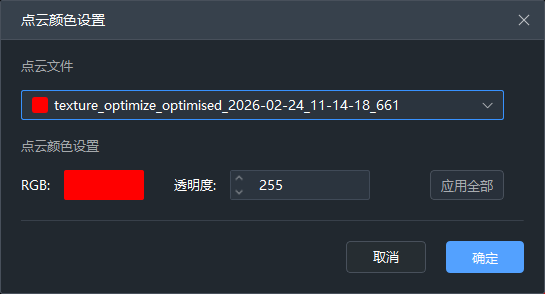
¶ RGB渲染
对视图内点云各自按照选择的RGB颜色和透明度整体渲染显示。
¶ 透视渲染
对视图内点云基于当前渲染方式(高程/强度/纹理/RGB)并叠加透视模式进行渲染显示。
¶ EDL渲染
对视图内点云基于当前渲染方式(高程/强度/纹理/RGB)并叠加EDL模式进行渲染显示。
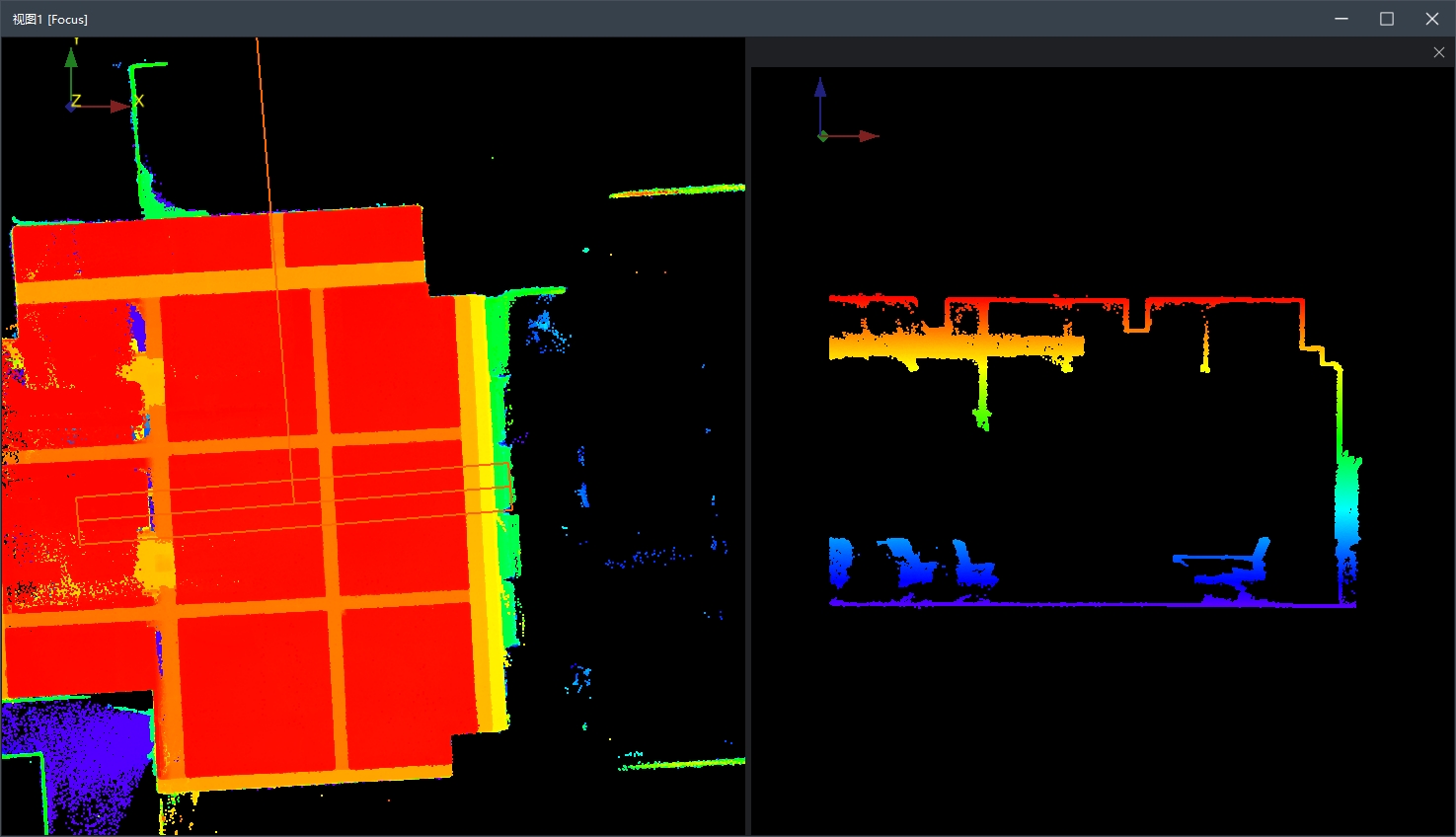
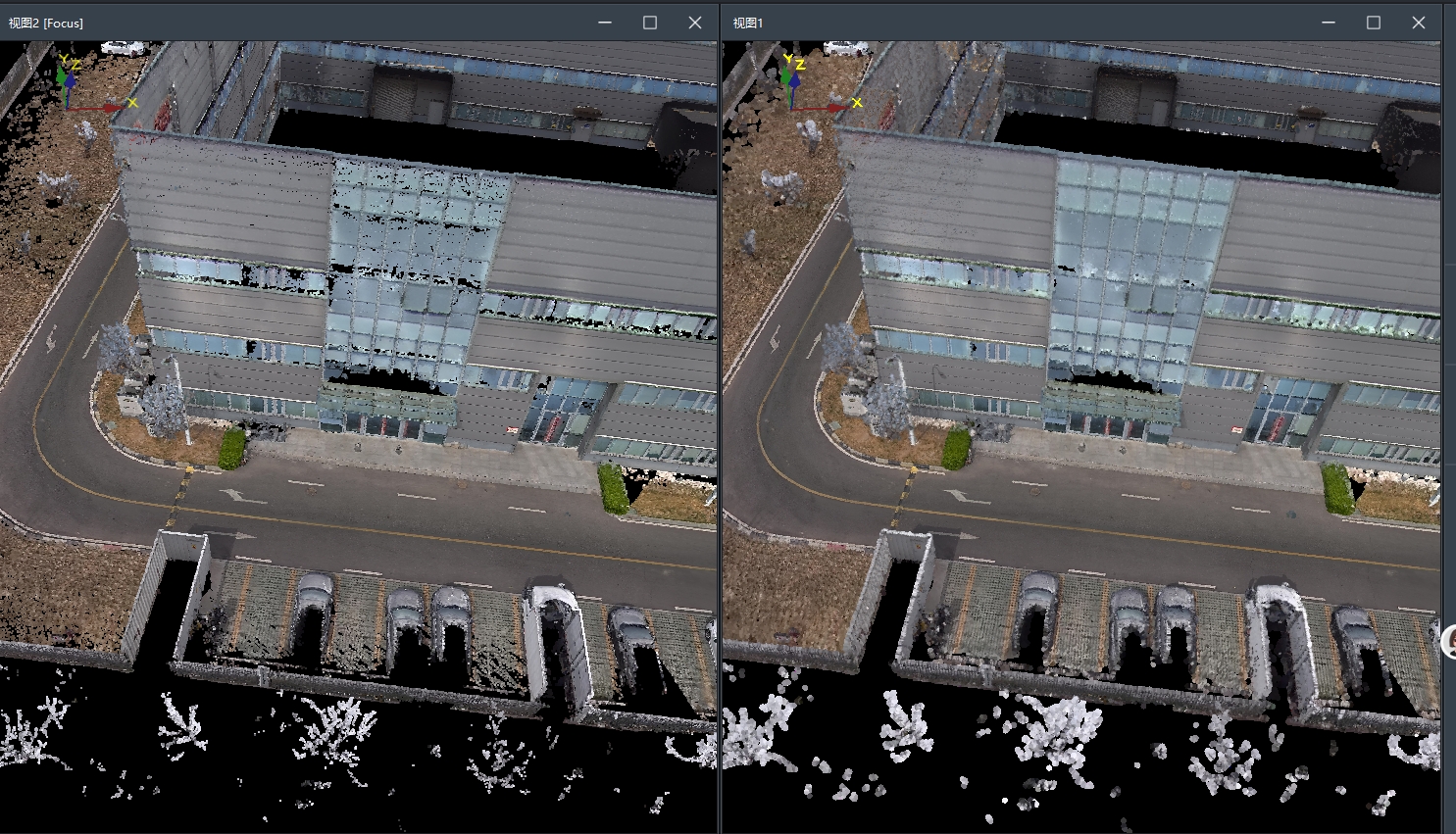
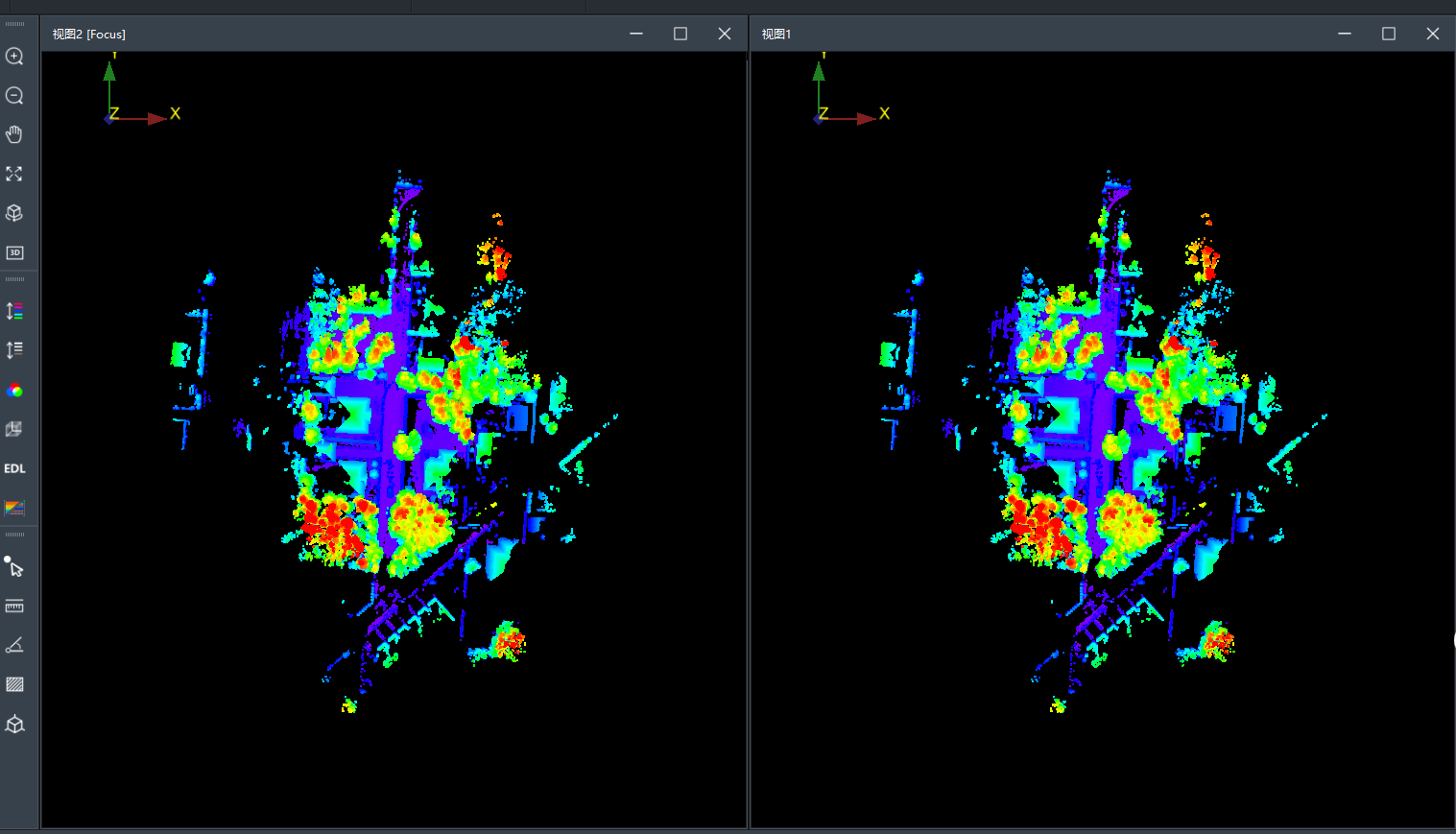
¶ HQS渲染
对视图内点云基于当前渲染方式(高程/强度/纹理/RGB)并叠加HQS模式进行渲染显示。下图中视图1为纹理渲染+HQS效果(右),视图2为纹理渲染(左)。
¶ 漫游
¶ 自主漫游
基于采集路线,即里程计文件,对当前主视图加载的一组点云数据进行动态漫游展示。
¶ 视频漫游
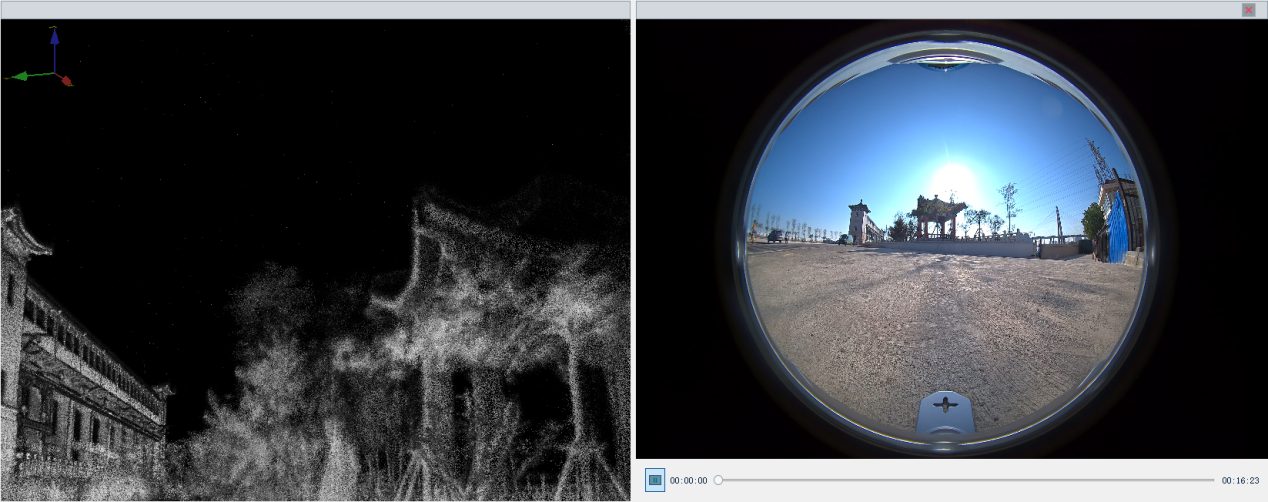
打开当前SLAM2000、SLAM1000、SLAM200工程中,设备自身镜头所拍摄的视频,并将点云与其联动显示。
¶ 显示
¶ 剖面显示
对主视图中加载点云进行剖面绘制显示。具体剖面参数设置可通过右上角设置-剖面设置进行设置。
以鼠标绘制两点,确定方向,第三点确认宽度的方式进行绘制,剖面图自动显示在剖面窗口中。
¶ 导出剖面
可将剖面窗口点云导出LAS格式点云、立面DOM成果。

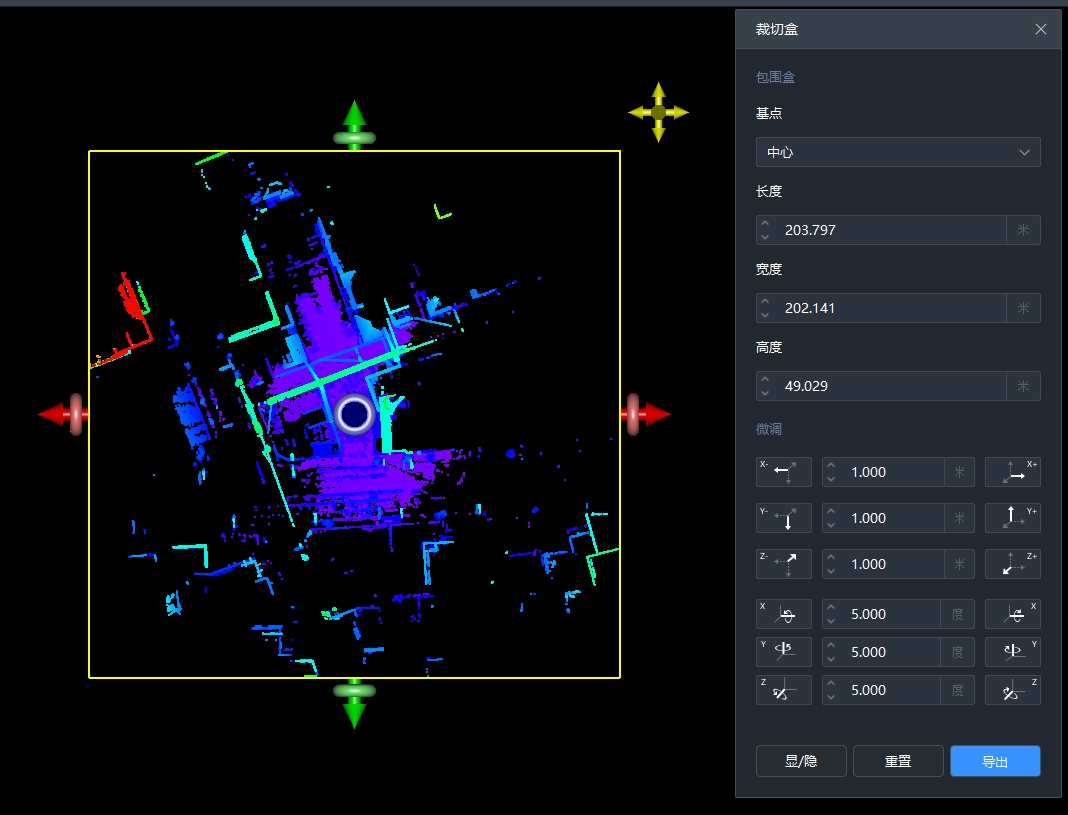
¶ 裁切盒
对主视图中显示点云进行X、Y、Z三个方向的裁切显示,便于查看点云内部结构或局部感兴趣区域。
直接在裁切盒操作:
【裁切】:鼠标左键点击箭头前后推动,即可进行裁切显示;
【旋转】:鼠标左键点击裁切盒每个面的旋转圈移动鼠标,从未起到旋转裁切盒的功能;
【平移】:鼠标左键点击裁切盒旁边黄色移动按钮移动鼠标;
通过裁切盒参数设置进行调整:
【基点】:调整长宽高数值时,变化的计算基点,包括中心、最大点、最小点、自定义基点(输入基点位置XYZ值、或勾选【拾取基点】后按Ctrl在点云上鼠标左键单击选择基点);
【长度、宽度、高度】:裁切盒的总长度、宽度、高度;
【微调】:微调裁切盒的各面位置和三轴旋转角度,位置微调数值支持设置正、负值用以放大和缩小;
【显/隐】:显示/隐藏裁剪框;
【重置】:重置裁切盒各参数;
【导出】:导出裁切盒内数据,导出结果为las格式。
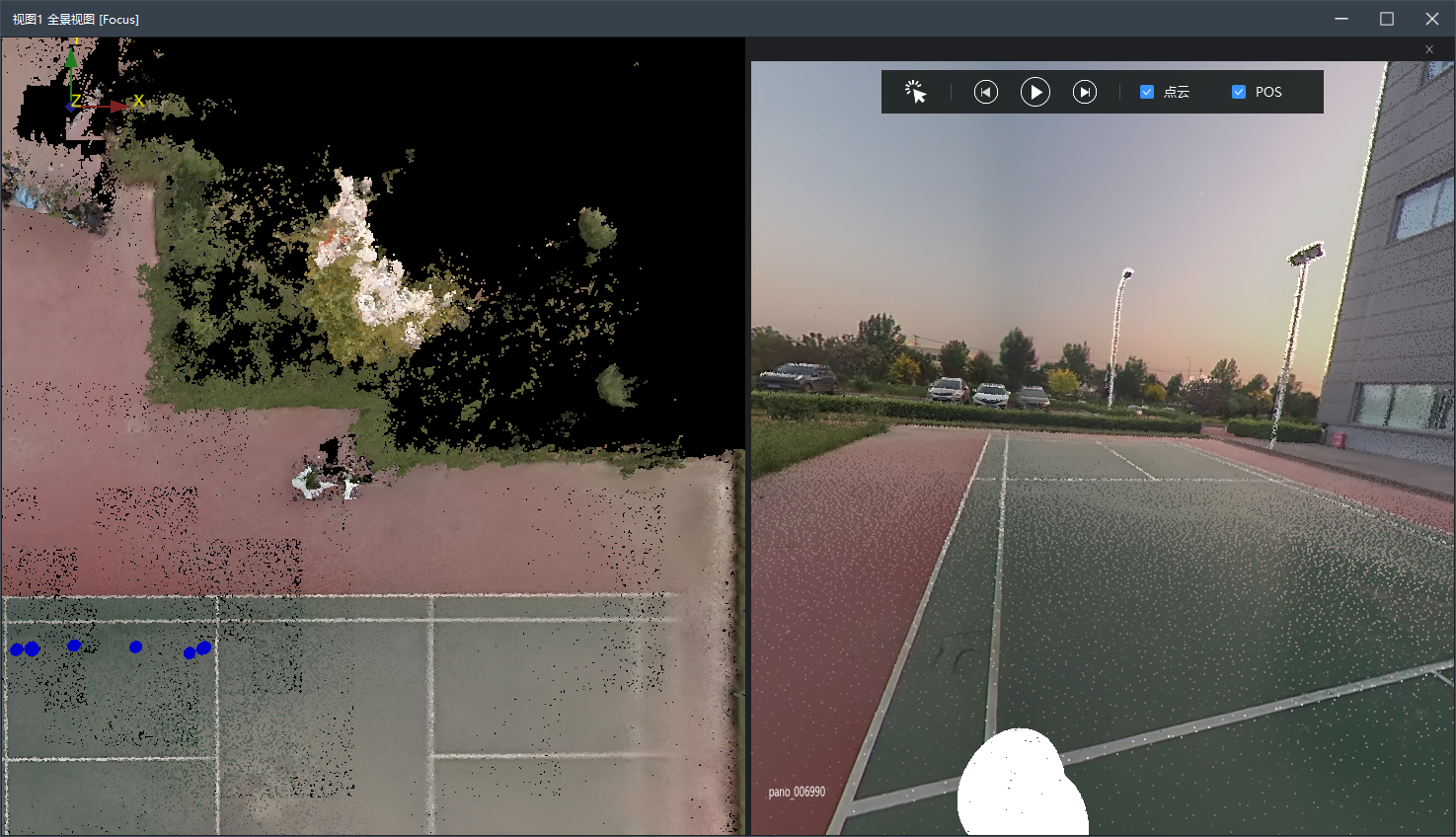
¶ 全景图显示
显示当前工程中生成的全景成果。
使用步骤:在已解算点云,并生成全景图的前提下,将全景POS加入到视图中,启动全景图查看窗口,点击POS点位默认显示为蓝色,捕捉到的POS点位显示为黄色矩形框,双击打开对应点位的全景图,已打开的全景图其对应的POS显示为红色点位。通过拾取POS点,双击显示该点位所对应的全景图。
按钮说明:可通过点击全景视图窗口上方按钮,选择全景显示帧、显示上一帧、从当前帧自动播放、显示下一帧、是否叠加显示点云(该功能当前仅支持360°*360°全景模块时生效)、是否叠加显示POS点(该功能当前仅支持360°*360°全景模块时生效)。
ps:全景图叠加点云测量功能可通过点击【测量】模块对应功能按钮使用。
¶ 视图
【视图】菜单中包括六个方位视图、正交/透视投影切换、视图简单操作等功能。
¶ 视图
¶ 前视图
将主视图视角切换至前视图。
前视图
¶ 后视图
将主视图视角切换至后视图。

后视图
¶ 左视图
将主视图视角切换至左视图。
左视图
¶ 右视图
将主视图视角切换至右视图。
右视图
¶ 顶视图
将主视图视角切换至顶视图。
顶视图
¶ 底视图
将主视图视角切换至底视图。
底视图
¶ 投影模式
¶ 正交投影
将主视图中当前点云显示为正交投影状态。
¶ 透视投影
将主视图点云状态转为透视投影状态。
¶ 视图操作
¶ 全图
将视图内全部数据居中显示。
¶ 旋转
启动旋转功能,此时鼠标左键为旋转功能,按住鼠标左键旋转,即可对视图内数据执行旋转浏览。
¶ 2/3D视图
对视图进行二维、三维显示切换。
¶ 点云视图窗口绑定/点云视图窗口解绑
新建多个窗口并在各个窗口加入同一位置点云数据,点击该按钮实现点云视图窗口绑定/点云视图窗口解绑。
¶ 测量
【测量】菜单中包括点选、多点测量、距离测量、坡度测量、角度测量、面积测量、空间测量,该模块各功能在点云视图、剖面视图、全景视图(叠加点云)均可使用。

¶ 点选
激活点选功能,在视图中选择点位,可显示其属性信息。
¶ 多点测量
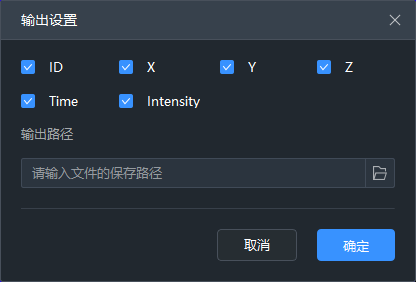
记录在视图中选择的多个点位信息,可以导出所选点的信息到txt文件中。
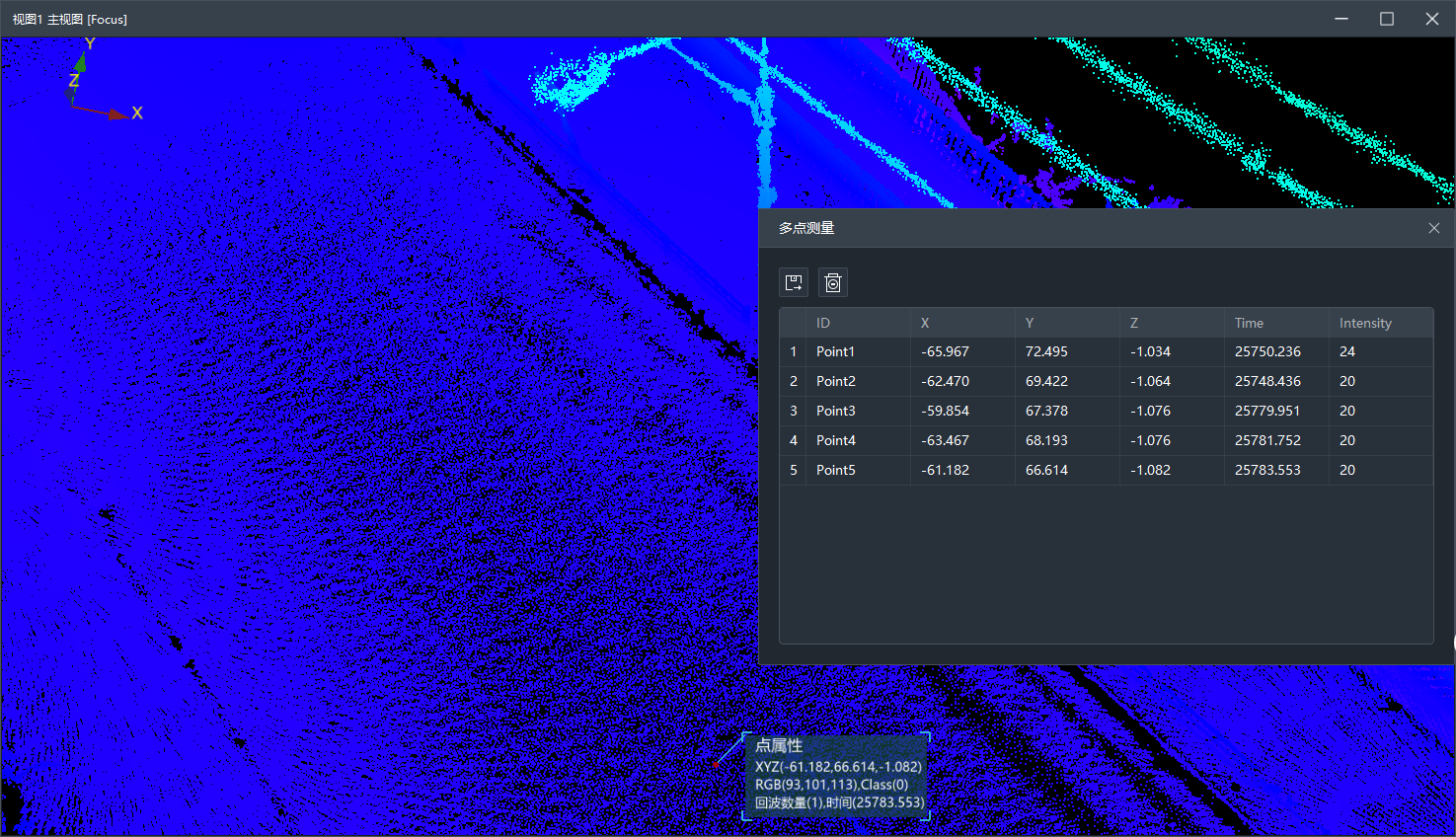
多点测量输出设置
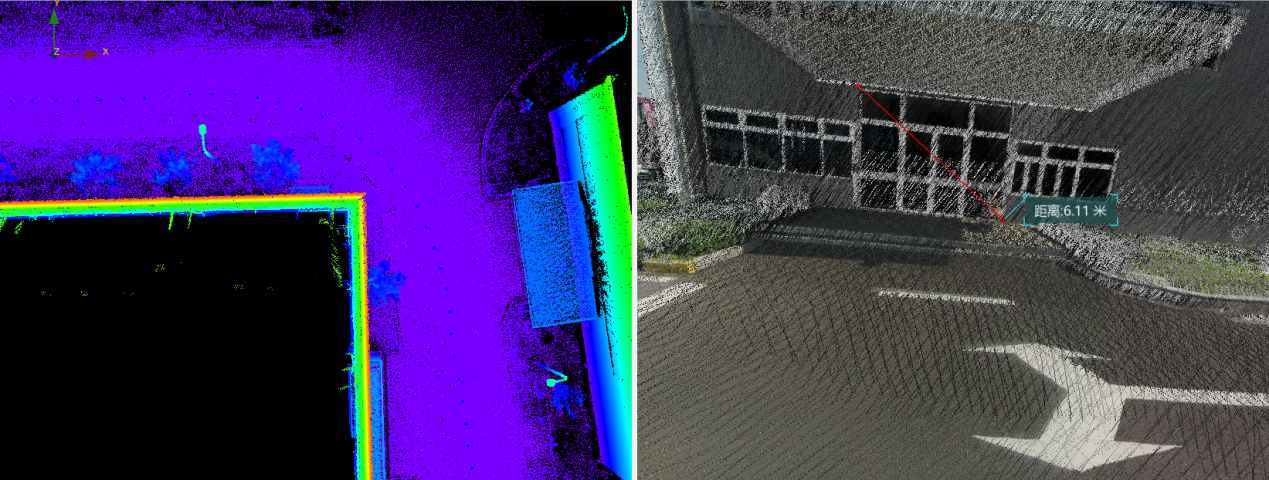
¶ 距离测量
测量所选两点间的空间距离
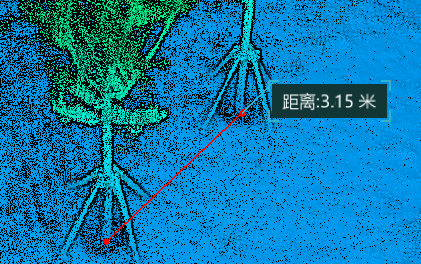
该功能也可为全景图视图中点云进行距离测量。
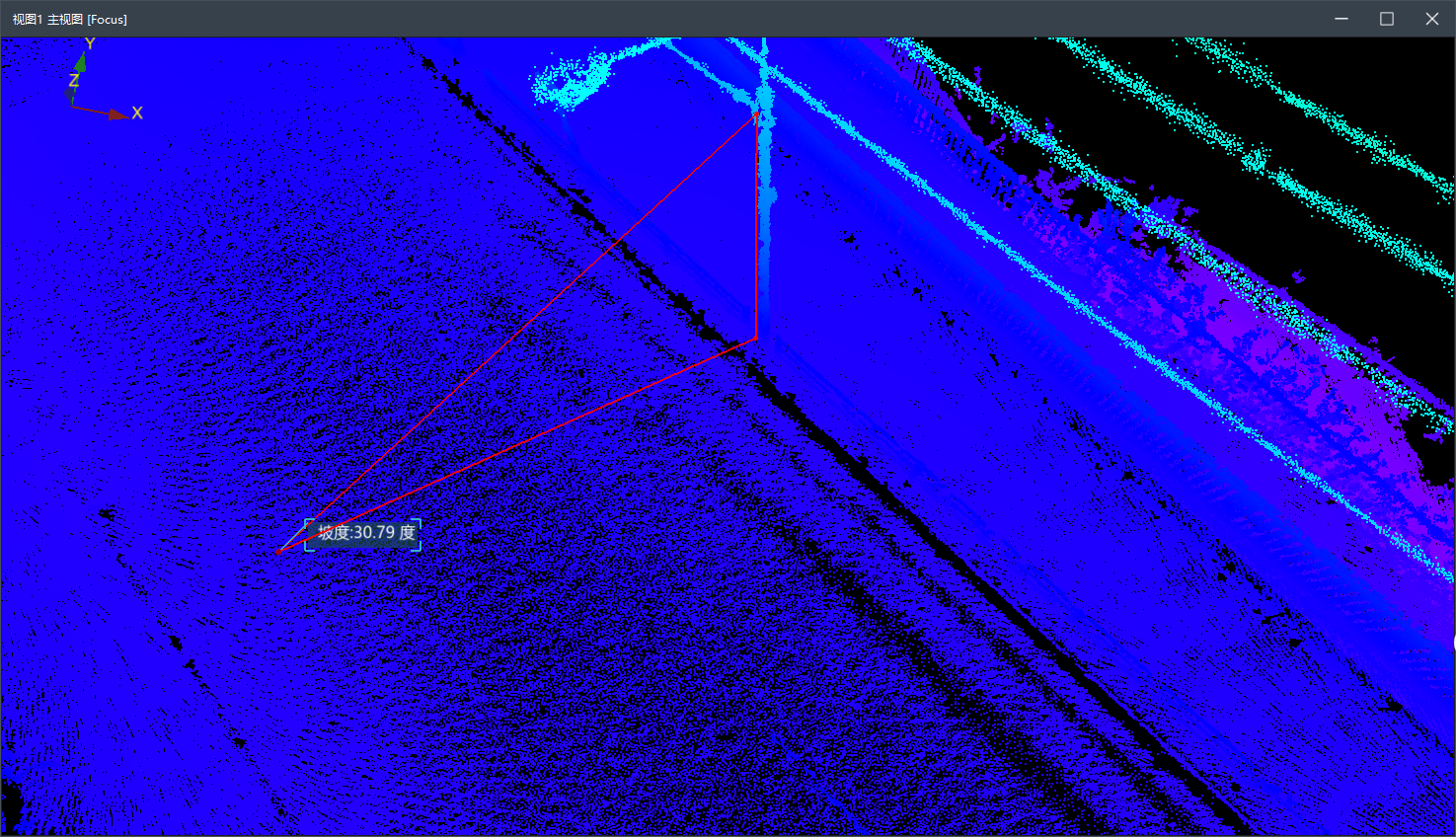
¶ 坡度测量
测量所选两点构成的直线与水平方向之间的夹角,绘制终点为所测量角的顶点
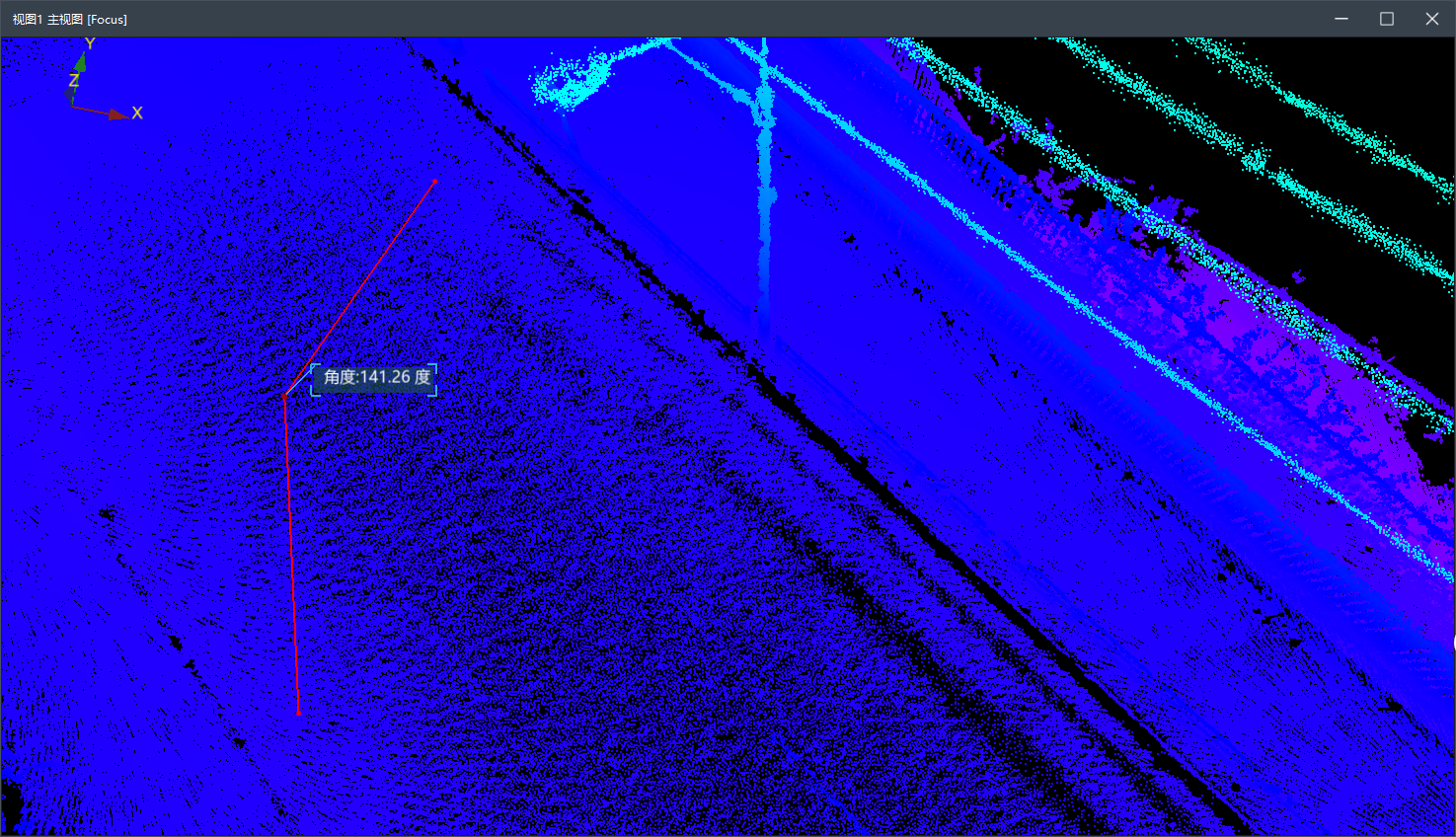
¶ 角度测量
测量所选三点所构成的两条线段的内角角度。
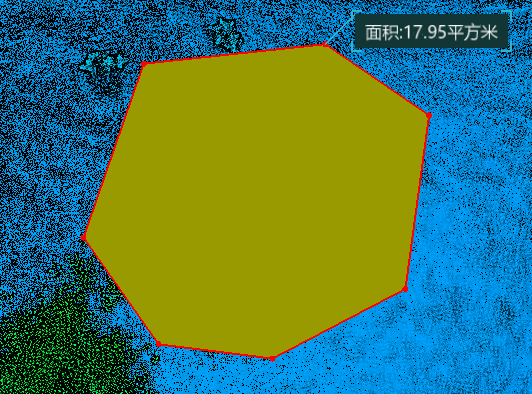
¶ 面积测量
测量所绘制闭合区间的面积,左键点击绘制,双击结束绘制
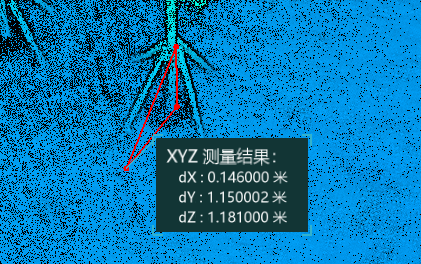
¶ 空间测量
测量两点间的三维坐标的差值
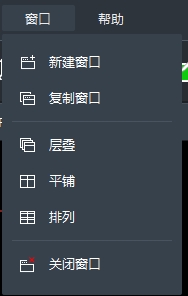
¶ 窗口
【窗口】菜单中包括新建、复制窗口;窗口状态设置:层叠、平铺、排列;关闭窗口。
¶ 新建窗口
新建一个视图窗口。
¶ 复制窗口
复制当前激活窗口显示的数据在一个新建视图窗口中,并保持原设置渲染模式。
¶ 窗口显示状态
¶ 层叠
所有视图窗口层叠显示。
¶ 平铺
所有视图窗口平铺显示。
¶ 排列
所有视图窗口按照窗口序号排列显示。
¶ 关闭窗口
关闭当前所有视图窗口。
¶ 帮助
【帮助】菜单中包括帮助文档、官方网站、关于、意见建议。
¶ 帮助文档
点击跳转官方帮助文档网址,可查看软件功能相关使用手册等资料。
¶ 官方网站
点击跳转飞马机器人官方网站,了解公司相关信息。
¶ 关于
点击可查看软件版本号、简介、版权归属等信息。
¶ 意见建议
点击可反馈关于软件的意见、建议、bug等。
¶ 工程列表
工程列表窗口中的功能均以选中标识行右键的方式进行显示、调用。
¶ 可视化工程
列表窗口中,选中可视化工程-点云数据,右键,即可加入已有点云成果(.las、.fmi)到软件中进行查看。
¶ 工程
对所选工程进行激活、编辑、导出、打开路径等等处理。
在工程列表窗口中,选中所建工程名称行,右键,即可调用相关功能。
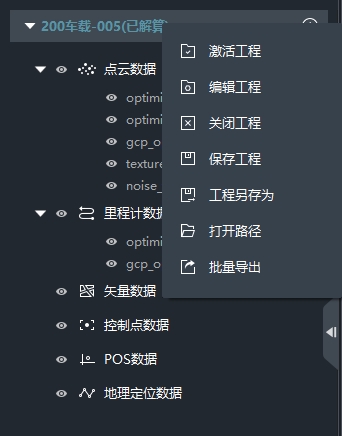
- 激活工程:激活当前选择工程;
- 编辑工程:编辑当前选择工程;
- 关闭工程:关闭当前选择工程;
- 保存工程:保存当前选择工程;
- 工程另存为:工程另存为当前选择工程;
- 打开路径:打开工程所在路径;
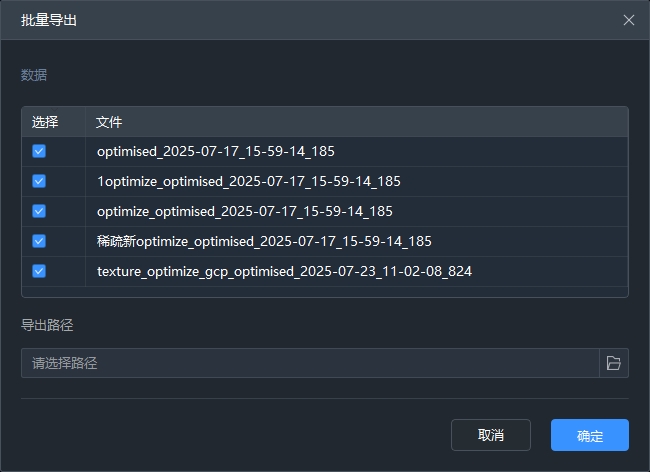
- 批量导出:批量导出当前选择工程中的数据为las。
¶ 点云数据
在工程列表窗口中,选中点云文件,右键,即可调用相关功能。
对所选点云数据执行视图添加、移除、缩放到视图、显示/隐藏、导出、打开路径、属性查看等处理。
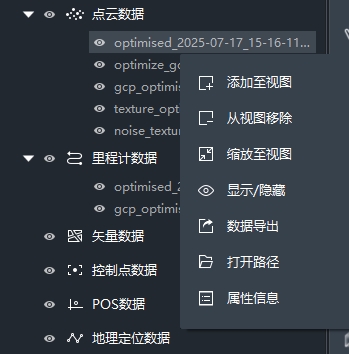
- 添加至视图:将当前所选点云添加至激活视图显示
- 从视图移除:将当前所选点云在激活视图中移除
- 缩放至视图:将当前所选点云在激活视图中居中显示
- 显示/隐藏:显示/隐藏当前所选点云(点云已添加至视图显示后生效)
- 数据导出:将当前所选点云导出
- 打开路径:打开当前所选点云文件的保存路径
- 属性信息:查看点云属性信息

¶ 里程计数据
对所选里程计数据执行视图添加、移除、显示/隐藏、导出等处理。
在工程列表窗口中,选中里程计文件,右键,即可调用相关功能。
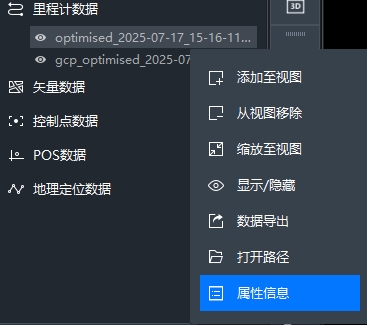
- 添加至视图:将当前所选里程计添加至激活视图显示
- 从视图移除:将当前所选里程计在激活视图中移除
- 缩放至视图:将当前所选里程计在激活视图中居中显示
- 显示/隐藏:显示/隐藏当前所选里程计(点云已添加至视图显示后生效)
- 数据导出:将当前所选里程计导出
- 打开路径:打开当前所选里程计文件的保存路径
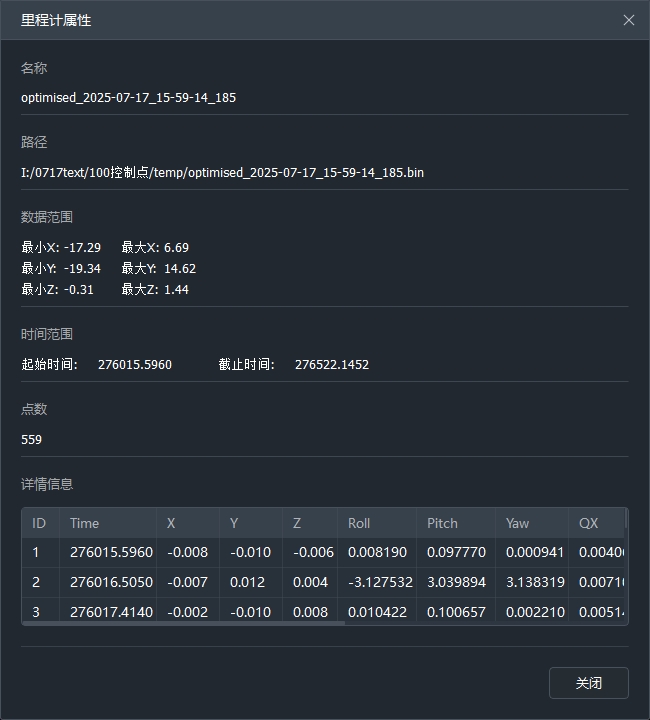
- 属性信息:查看里程计属性信息
¶ 矢量数据
功能当前暂未开放。
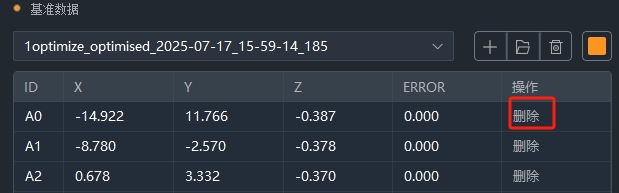
¶ 控制点数据
对所选控制点数据执行导入、移除等处理。
在工程列表窗口中,选中控制点数据行,右键,即可调用相关功能。
¶ 添加数据-导入控制点
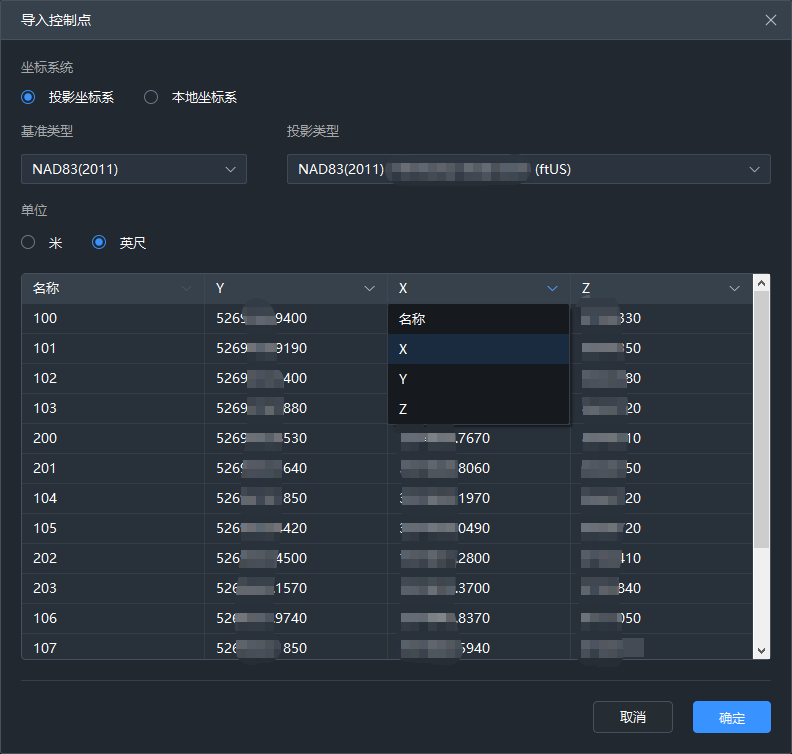
- 坐标类型:选择控制点坐标系类型
【本地坐标系】将导入控制点设置为本地坐标系
【投影坐标系】将导入控制点设置为投影坐标系
- 基准类型:选择控制点文件的椭球基准
- 投影类型:选择控制点文件的投影坐标系统
- 导入控制点单位:可选择控制点单位米、英尺(如果选择英尺会自动对控制点进行单位转换,最终转换为米导入)
- 修改X、Y、Z列对应关系:通过点击X\Y\Z列表头修改每列数值和表头对应关系
- 确定:将控制点文件添加至软件中
- 取消:取消控制点文件导入并关闭该页面
¶ 控制点数据右键功能
在工程列表窗口中,选中控制点数据下控制点文件行,右键,即可调用相关功能。
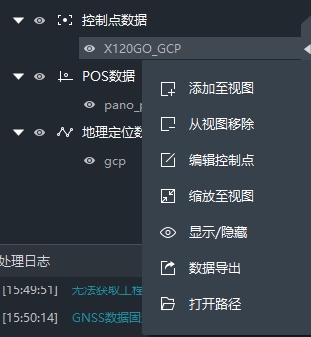
- 添加至视图:将当前所选控制点添加至激活视图显示
- 从视图移除:将当前所选控制点在激活视图中移除
- 编辑控制点:修改导入控制点文件的坐标系、对应关系等
- 坐标系统:修改控制点坐标系统
【投影坐标系】将导入控制点修改为投影坐标系
【本地坐标系】将导入控制点修改为本地坐标系
- 基准与投影
【基准】修改控制点文件的椭球基准
【投影类型】修改控制点文件的投影坐标系统
- 参考点、匹配点表格
【参考点】当前所选控制点名称
【匹配点序号】当前所选控制点所对应的匹配点点号,支持修改(当默认顺序不匹配时)
【检查点】将所选控制点设置为检查点,不参与控制,仅作为精度检核,前提是该点必须有相对应的匹配点
【参考点X\Y\Z】控制点的
【匹配点X\Y\Z】
- 匹配:根据控制点相对位置关系,自动为其调整对应的匹配点
- 撤销:操作回退
- 重置:回到本次进入控制点编辑的初始状态
- 确定:保存当前修改,并退出控制点编辑
- 取消:取消控制点编辑界面中所做的修改,并退出界面

- 缩放至视图:将当前所选控制点在激活视图中居中显示
- 显示/隐藏:显示/隐藏当前所选控制点(控制点已添加至视图显示后生效)
- 数据导出:将当前所选控制点导出为文本文件(*.txt)
- 打开路径:打开当前所选控制点文件的保存路径
¶ POS数据
对所选POS数据执行视图添加、移除、显示/隐藏、导出等处理。
在工程列表窗口中,选中POS文件,右键,即可调用相关功能。
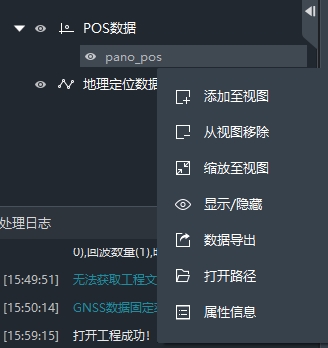
- 添加至视图:将当前所选POS添加至激活视图显示
- 从视图移除:将当前所选POS在激活视图中移除
- 缩放至视图:将当前所选POS在激活视图中居中显示
- 显示/隐藏:显示/隐藏当前所选POS(POS已添加至视图显示后生效)
- 数据导出:将当前所选POS导出
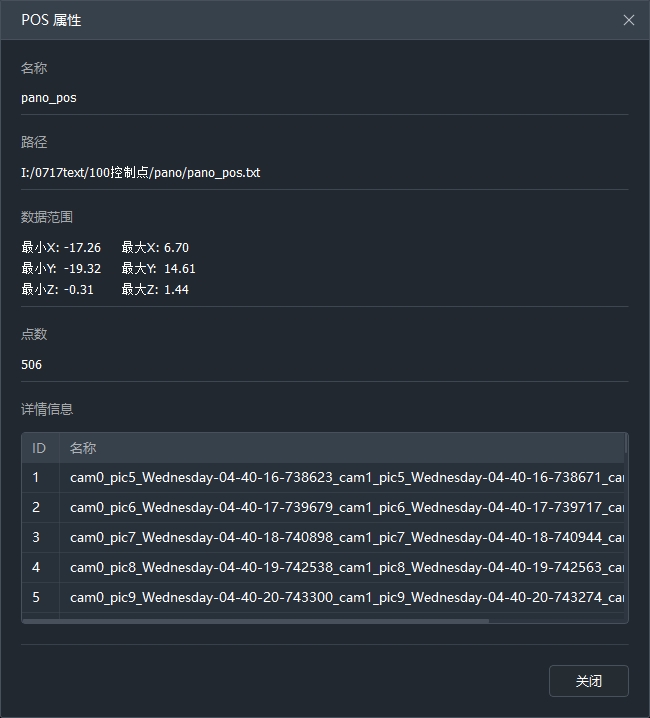
- 属性信息:查看POS属性信息
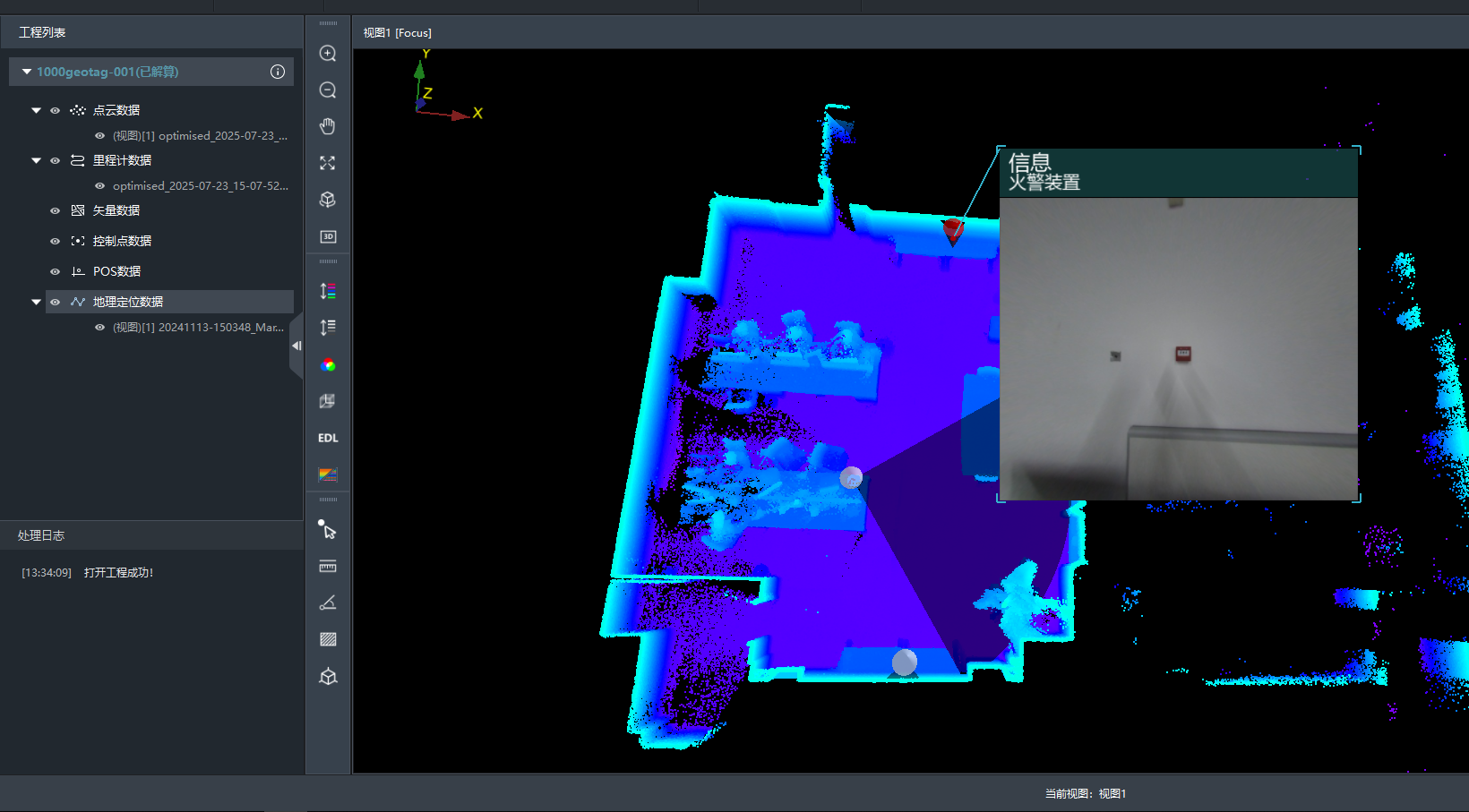
¶ 地理定位数据
对所选地理定位数据执行视图添加、移除处理。
在工程列表窗口中,选中地理定位数据,右键,即可调用相关功能。
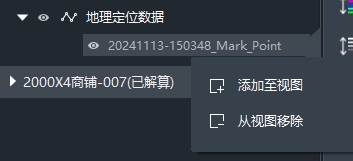
使用【测量】→【点选】功能点击地理定位数据点,即可查看该点对应的图片和名称;双击图片可打开详细查看页面,可查看图片详情和修改该点名称。
¶ 右上角【设置】
右上角【设置】菜单包括剖面设置、视图设置、画布设置、点大小设置、土方量设置、许可。
¶ 剖面设置
剖面宽度设置,可设置固定宽度、绘制宽度模式旋转,固定宽度的半径值设置。
¶ 视图设置
可设置当前视图窗口的坐标轴、图例的显示,每个视图中该设置独立。
¶ 画布设置
自定义视图窗口背景色,每个视图中该设置独立。
¶ 点大小设置、未赋色点颜色设置
修改当前视图内点云数据的点大小。
点云未赋色点颜色设置:如点云赋色时勾选输出未赋色点,该参数可设置赋色结果中的未赋色点显示颜色和透明度,设置的RGB颜色亦可在点云导出结果中起效。
¶ 土方量设置
主要用于土方量模块-变化分析变化前后的表面颜色进行设置,体积计算、变化分析的计算单位、输出报告相关参数进行设置,包含点云颜色设置,计算面积、体积、重量单位设置,输出报告的公司名称、公司Logo设置。
¶ 授权
导入授权文件即可支持软件软授权进行软件处理。
¶ 软件快捷键
¶ 点云浏览窗口
点云浏览窗口快捷键功能如下:
- ↑ ↓ ← →: 平移
- Q、E:点云按照视图逆时针、顺时针旋转
- W、S:点云按照视图上、下方向旋转
- A、D:点云按照视图左、右方向旋转
- +、-:放大缩小
- 空格:全图
¶ 数据文件目录
¶ 原始数据文件
对SLAM产品系列原始文件格式做出如下说明,其中是否为必要性仅针对于数据解算方向进行评估。
¶ SLAM100
SLAM100原始数据目录结构:
├── camera0 0号相机影像存储目录 必要数据
├── camera1 1号相机影像存储目录 必要数据
├── camera2 2号相机影像存储目录 必要数据
├── 240301-024859_00266IMU_DATA_0001.txt IMU原始记录文件 必要数据
├── 240301-024859_00266_RASTER_DATA_0001.txt 光栅原始记录文件 必要数据
├── 240301-024859_00266_SLAM_Pandar_0001_0.pcap 激光原始记录文件 必要数据
└── feima_slam100_calib.yaml 设备标定文件 必要数据
¶ SLAM2000
SLAM2000原始数据目录结构:
├── 20240718-130226_Ec_Data.fmraster 光栅原始记录文件 必要数据
├── 20240718-130226_Hp_Imu.fmimr 高精度IMU原始记录文件 必要数据
├── 20240718-130226_Lidar_Data.fmlidar 激光原始记录文件 必要数据
├── 20240718-130226_Lidar_Imu.imu 激光雷达自身IMU记录文件 必要数据
├── 20240718-130226_Lp_Imu.fmimr 低精度IMU记录文件 必要数据
├── COLOR_CAM 鱼眼相机数据文件夹 必要数据
├── Description_File.txt 描述文件 必要数据
├── slam_calib.yaml 设备标定文件 必要数据
├── REAL_SLAM 实时点云成果文件夹 非必要数据,且占用体积较大,只做后处理可以不拷贝
├── OPTICAL_CAM 视觉相机数据文件夹 非必要数据,且占用体积较大,只做后处理可以不拷贝
¶ SLAM200
SLAM200原始数据目录结构:
├── 20250528-132239_Ec_Data.fmraster 光栅原始记录文件 必要数据
├── 20250528-132239_Hp_Imu.fmimr 高精度IMU原始记录文件 必要数据
├── 20250528-132239_00025_SLAM_Pandar_0001_0.fmlidar 激光原始记录文件 必要数据
├── 20250528-132239_Rtk.dfnav 设备自身GNSS数据记录文件,机载模式使用 必要数据
├── 20250528-132239_Rtk.fmcompb 设备自身记录流动站数据 必要数据
├── 20250528-132239_Rtk.fmnav 设备自身GNSS数据记录文件,除机载模式使用 必要数据
├── 20250528-132744_Mark_Point.fmmark 设备采集过程记录控制点、静态点、兴趣点信息文件 必要数据
├── COLOR_CAM 鱼眼相机数据文件夹 必要数据
├── Description_File.txt 描述文件 必要数据
├── pano_calib.yaml 全景相机标定文件 必要数据
├── slam_calib.yaml 设备标定文件 必要数据
├── REAL_SLAM 实时点云成果文件夹 非必要数据,且占用体积较大,只做后处理可以不拷贝
¶ SLAM1000
SLAM1000原始数据目录结构:
├── 20240718-130226_Hp_Imu.fmimr 高精度IMU原始记录文件 必要数据
├── 20240718-130226_Lidar_Data.fmlidar 激光原始记录文件 必要数据
├── 20240718-130226_Lidar_Imu.imu 激光雷达自身IMU记录文件 必要数据
├── 20240718-130226_Mark_Point.fmmark 设备采集过程记录控制点、静态点、兴趣点信息文件 必要数据
├── COLOR_CAM 鱼眼相机数据文件夹 必要数据
├── Description_File.txt 描述文件 必要数据
├── slam_calib.yaml 设备标定文件 必要数据
├── REAL_SLAM 实时点云成果文件夹 非必要数据,且占用体积较大,只做后处理可以不拷贝
¶ SRTK100
SRTK100原始数据目录结构:
├── Firmware 固件 非必要数据
├── Log 设备日志 非必要数据
├── Nav 实时差分轨迹文件,即RTK轨迹文件 必要数据
├── Ppp 后差分 非必要数据
├── Raw 原始数据 非必要数据
├── Rtcm 协议 非必要数据
└── System 系统 非必要数据
¶ S-PANO100
S-PANO100全景相机原始数据目录结构:
├── config 原始数据包 非必要数据
├── Log 相机调试日志 非必要数据
├── pano 机内拼接拍照和录像数据 非必要数据
├── src 机外拼接拍照数据 必要数据
└── updata 更新包 非必要数据
¶ 成果目录
¶ 成果文件夹
成果目录文件夹结构说明:
├── clip 点云裁切输出目录
├── denoise 点云去噪输出目录
├── dimages 去畸变影响输出目录
├── filter 行人滤波输出目录
├── frames SLAM2000\SLAM200\SLAM1000鱼眼相机视频提取的照片输出目录
├── gcp 定向点云输出目录
├── log 处理日志输出目录
├── odometer 里程计输出目录
├── optimizer 优化点云输出目录
├── pano 全景图输出目录(SLAM100内置相机拼接结果)
├── pos 影像(dimages文件夹内)POS输出目录
├── register 拼接转换输出目录
├── sudiv 点云分幅输出目录
├── temp 临时数据输出目录,含原始建图点云
├── texture 点云赋色输出目录
└── *.sprj 工程文件
¶ 文本文件格式说明
对SLAM数据解算过程中产生的文本文件格式做出如下说明。
¶ 影像POS文件
对工程目录下POS文件夹内文本文件格式做出如下说明:
camera_pos.txt
camera_pos_opk.txt
¶ 全景POS文件
对工程目录下pano文件夹内文本文件格式做出如下说明:
pano_pos.txt 全景影像pos
pano_pos_opk.txt 全景影像定向后pos
¶ 里程计文件
对工程目录下odometer文件夹内文本文件格式做出如下说明:
HF_odometry.txt