¶ 一、断点续扫定义
第一组数据结束位置必须是第二组数据的开头,设备的位置与朝向都需一致,即同点位、同朝向开始和结束,设备开始与结束必须都在地面或者稳定的物体表面。
¶ 二、多架次拼接数据采集方式
¶ 2.1 非定向工程数据采集+非定向工程数据采集
需严格按照断点续扫的要求进行外业数据采集。
¶ 2.2 非定向工程数据采集+定向工程数据采集(包括RTK或控制点)
需严格按照断点续扫的要求进行外业数据采集。
¶ 2.3 定向工程数据采集(包括RTK或控制点)+定向工程数据采集(包括RTK或控制点)
无需按照断点续扫的要求进行数据采集,在采集时只需要保证两组数据之间有重叠路线,重叠路线指两次数据采集的轨迹路径需要有重叠。在通视情况下,两个工程的控制点数据不强制要求有相同的控制点,只需要保证两个工程的点云数据具有重叠区域。
注:由于很难保证SLAM机载模式采集数据与手持模式采集的数据遵循断点续扫原则,因此如果需要做空地融合多架次拼接,需采用定向工程数据采集+定向工程数据采集的模式。
¶ 三、多架次工程数据拼接
¶ 3.1 原始采集工程数据解算
非定向工程数据解算需完成点云建图解算步骤;
定向工程数据解算需完成点云建图、重定向解算步骤。
¶ 3.2 多架次拼接
将解算的非定向工程数据或定向工程数据,导入到多架次拼接列表中,进行多架次拼接,具体操作步骤如下:
(1)点击“多架次拼接—>添加工程”,将参与多架次拼接的解算工程添加到工程列表中;
(2)根据外业实际采集顺序输入多架次拼接顺序;
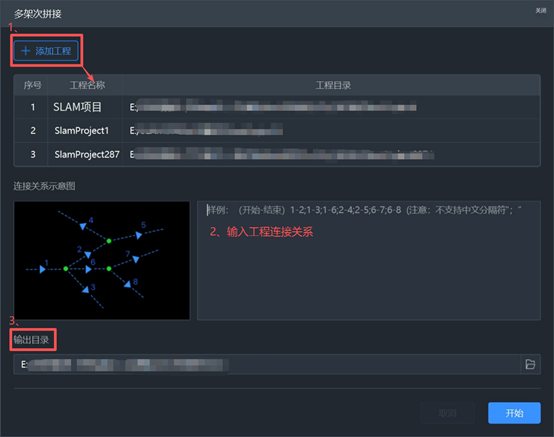
(3)设置多架次拼接点云成果输出目录;
(4)点击“开始”按钮,进行多架次拼接,如果多架次拼接工程中具有定向工程数据,则在进行多架次拼接过程中,会以定向工程数据为基准进行数据拼接。如果多架次拼接工程不具有定向工程数据,则会按照采集顺序,以第一个架次的工程数据为基准进行数据拼接。
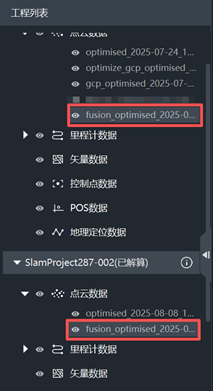
(5)拼接后的点云数据成果以*.las格式保存在步骤(3)设置的成果目录中,同时会以*.fmi格式保存到各自解算工程目录下的“fusion”文件夹中。

¶ 四、多架次拼接数据后处理
多架次拼接完成后,可基于拼接后的成果(fusion文件夹中的点云数据),进行点云优化、全景图生成、点云赋色等步骤。