¶ 软件简介
SLAM GO POST为与飞马手持激光扫描仪配套的PC端软件,内嵌在无人机管家专业版中。该软件支持处理飞马全系列手持激光扫描仪所采集的数据。融合行业级高精度建图算法,可生产高精度、高精细度的彩色点云成果及全景图成果。
软件同样支持多种点云渲染方式,包括高程、强度、纹理、透视、EDL等模式,并可按采集轨迹进行自动漫游展示。多样化的量测功能,支持点、线、面等多种方式的测量输出。其简洁的界面分布,引导式的工程创建,结合一键式的处理流程,便于客户快速掌握。
¶ 配置需求
¶ 显卡驱动适配性
目前赋色需要使用到支持12.x以上的CUDA驱动版本,请更新显卡驱动。
针对1650的显卡,请驱动升级到至少32.0.xxxx版本。
¶ 硬件配置需求
| 项目 | 最低配置 | 推荐配置 | 说明 |
| CPU | x86_64架构芯片即可 | Intel 13代8核心 | AMD,INTEL, 或 支持x86_64的国产芯片 |
| GPU | 英伟达2060及其以上 | 英伟达4060 | 只支持英伟达显卡,cuda驱动支持12.1 以上版本 |
| 内存 | 16GB | 64GB | 建议32GB及其以上 |
¶ 软件安装
SLAM GO POST软件为依托于无人机管家主模块的附属模块,需要优先安装飞马无人机管家软件。通过访问以下网站可获取软件安装包。
飞马无人机管家软件下载链接如下:
https://feimarobotics.com/zhcn/productSupportDetail?name=uavmanager
主模块安装完毕后,通过桌面快捷方式打开。打开SLAM应用的,点击下载,下载SLAM应用程序组即可。
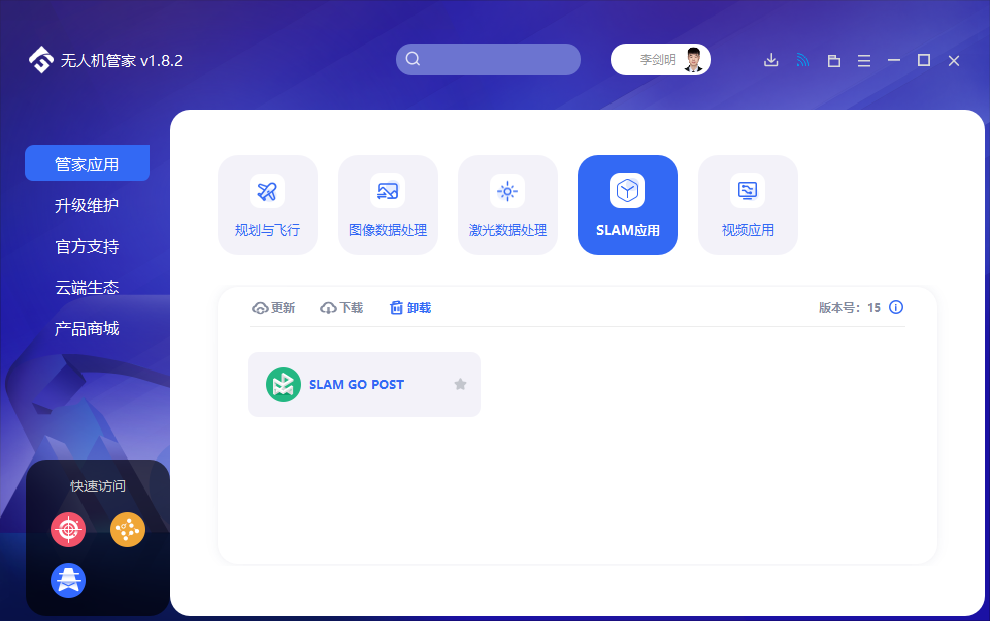
下载完毕后,单击SLAM GO POST应用即可。
¶ 工具栏
位于软件界面上方的工具栏,涵盖开始及视图两部分功能。主要实现数据处理功能及基础的视图渲染功能。

软件工具栏
¶ 数据管理窗口
数据管理窗口中显示当前已打开的工程列表。并逐工程显示其包含的数据目录。
数据管理窗口中显示为蓝色的为当前可执行操作的工程,显示为黑色的,则为未激活状态,即不可执行操作的工程。
注:批处理功能无此限制。可批处理当前打开的全部工程。
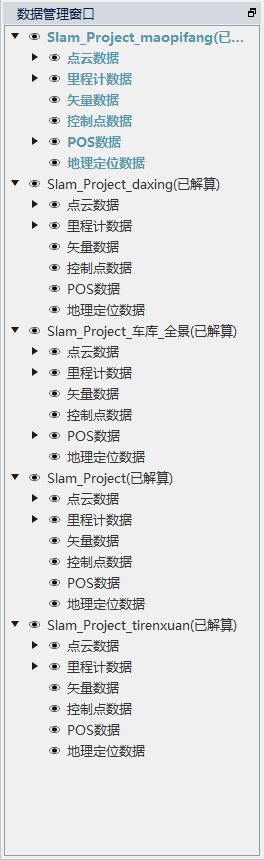
数据管理窗口
¶ 快捷工具条
快捷工具位于视图窗口上方,为常用的缩放、测量等功能。

快捷工具
¶ 视图窗口
软件中间区域则为视图显示窗口,支持单一视图、双视图显示,主要为主视图、剖面视图、全景视图三种视图窗口。
其中主视图为默认视图,不可关闭,剖面视图、全景视图窗口仅可与主视图共同启动,分别通过【剖面】、【全景图】功能调用。
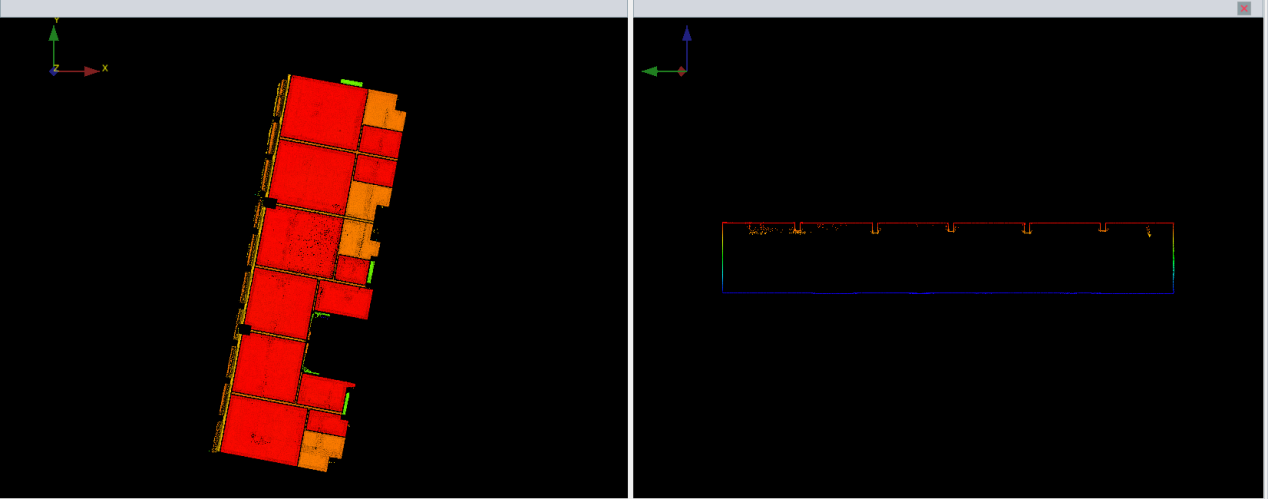
视图窗口
¶ 运行窗口
运行窗口左侧主要显示当前数据处理进图条,分为当前进度及总进度;右侧则为工程日志输出窗口,任务执行状态、成功/失败提示显示在该窗口中。

运行窗口
¶ 开始
【开始】菜单下,主要分为工程及数据处理两部分功能。
¶ 工程
¶ 新建
创建一个新的待解算工程。
¶ 功能说明
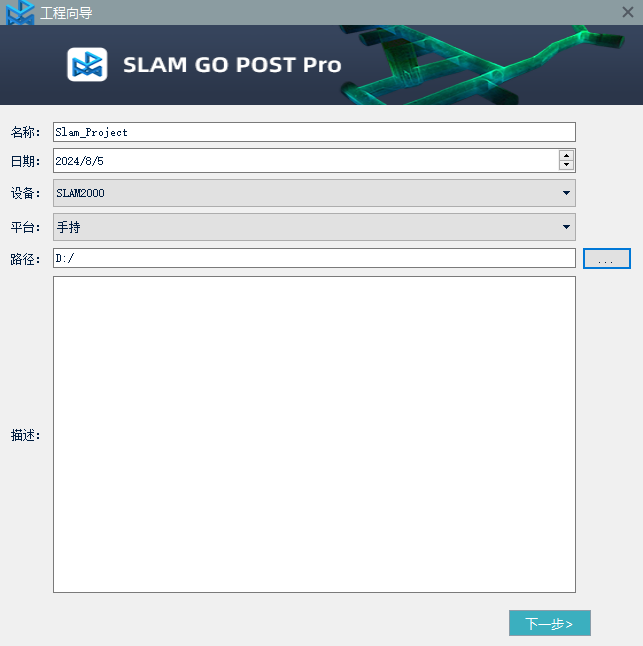
工程设置界面
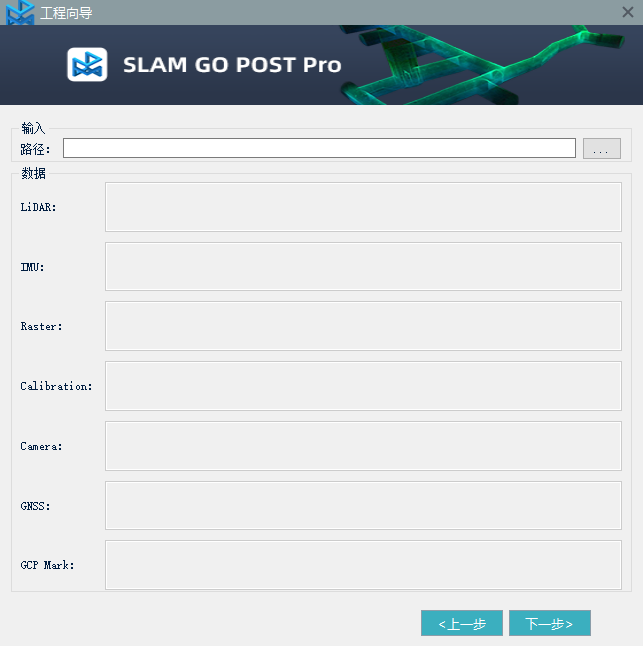
数据输入界面

坐标系统设置界面
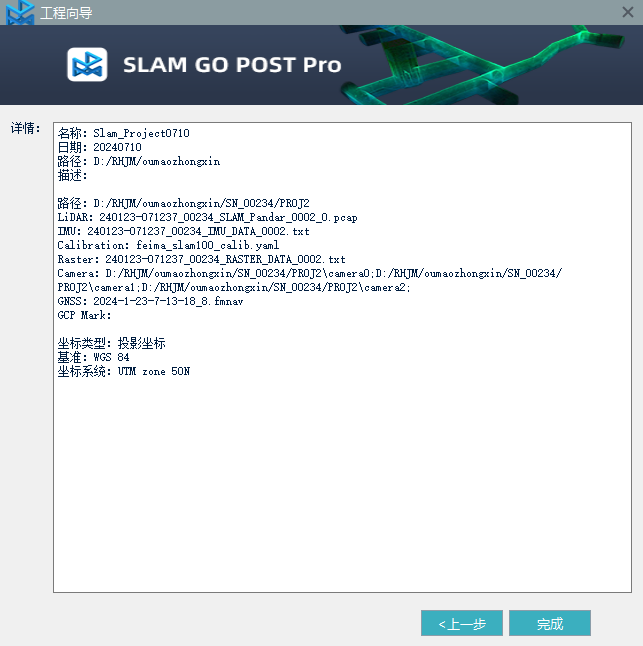
详情界面
¶ 打开
打开一个既有工程。
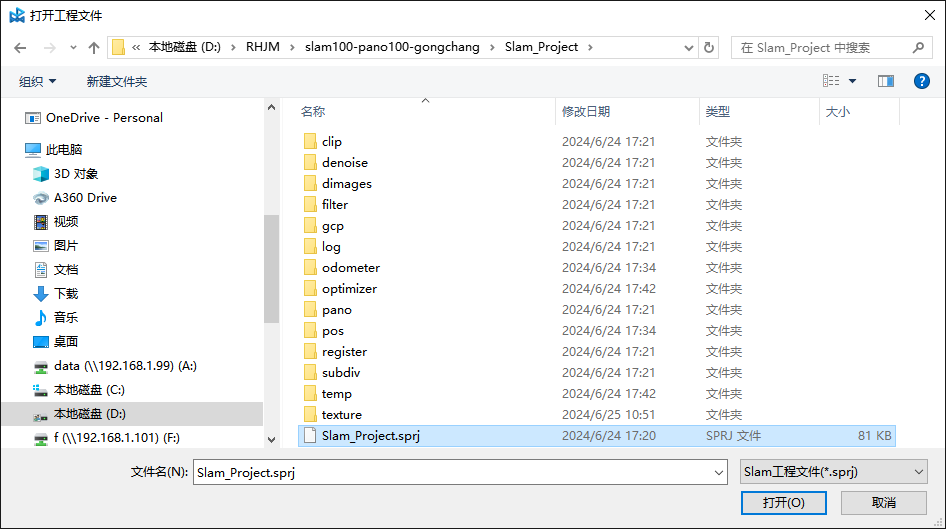
打开工程
¶ 保存
保存当前所打开的全部工程。
¶ 关闭
关闭当前打开的全部工程。
¶ 数据处理
¶ 一键处理
对当前处于激活状态的工程执行一键式解算处理。
¶ 功能说明

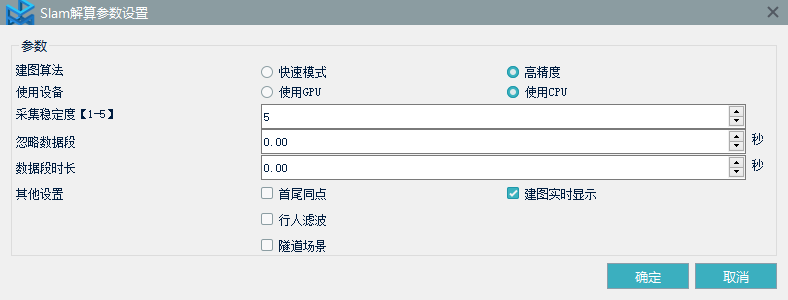
一键解算
【原始建图】执行建图匹配算法,得到原始点云成果
【建图优化】执行建图匹配算法后,并对其成果进行优化处理
【快速模式】满足常规场景的基本建图效果的建图算法
【高精度】通过提高迭代次数、匹配阈值,来提高建图精度,对场景结构丰富性要求较高
【使用GPU】全景图拼接时,使用GPU进行计算
【使用CPU】全景图拼接时,使用CPU进行计算
【刚体】基于控制点直接对解算后的点云做坐标转换
【非刚体】基于控制点或RTK数据优化点云并定向
【全景图】执行全景图拼接输出处理,其设置参数说明如下:
全景图设置
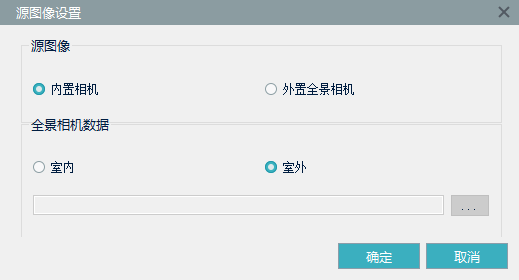
【赋色点云】输出赋色点云成果,其设置参数说明如下:

赋色设置
· 源图像:拼接图像来源
· 全景相机数据:全景相机使用场景
· 输出未赋色点云:是否输出未赋色的点云数据
· 优化POS:通过算法优化相机POS,提高位姿精度
【首尾同点】首尾约束设置,形成闭环消除分层
【建图实时显示】在主视图窗口中实时显示点云建图过程
【行人滤波】对建图后点云进行动态物体过滤
【导出赋色点云】将赋色点云成果导出为标准las格式
【隧道场景】切换至隧道建图算法,提高隧道场景建图效果及精度
¶ 批处理
对当前软件打开的全部工程执行批量解算处理。参数同一键处理。

批处理
¶ 点云建图
对当前激活工程执行点云建图处理。参数同一键处理中建图相关参数。
点云建图
¶ 重定向
对所选点云执行点云定向处理。
注:非刚体定向无需选择点云,默认基于建图成果处理。
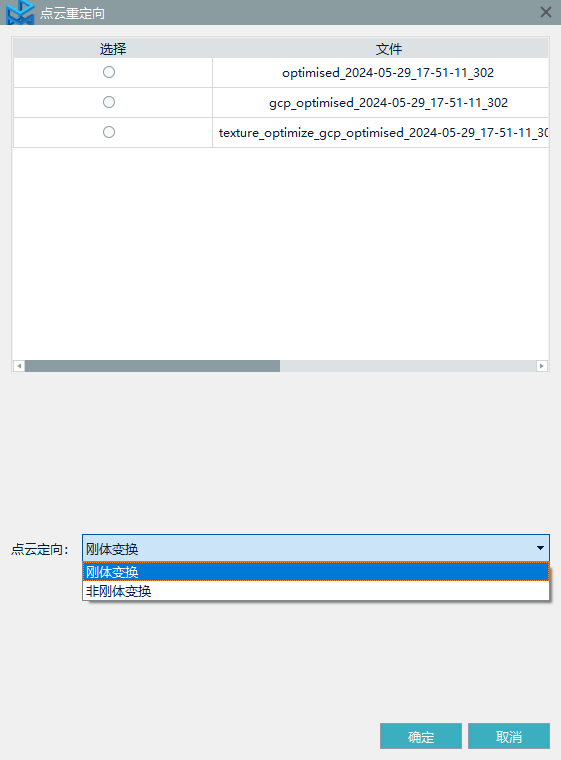
重定向
¶ 点云优化
对所选择点云执行优化处理。
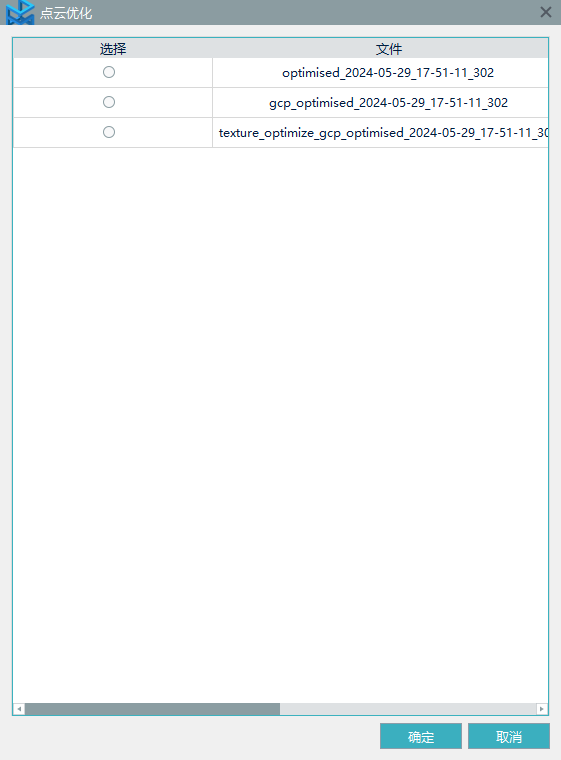
点云优化
¶ 去畸变
基于出厂检校参数,对影像数据执行去畸变处理,以保证后续全景图拼接及点云赋色的效果。
¶ 点云赋色
对所选点云执行点云赋色处理。参数同一键处理中赋色参数。
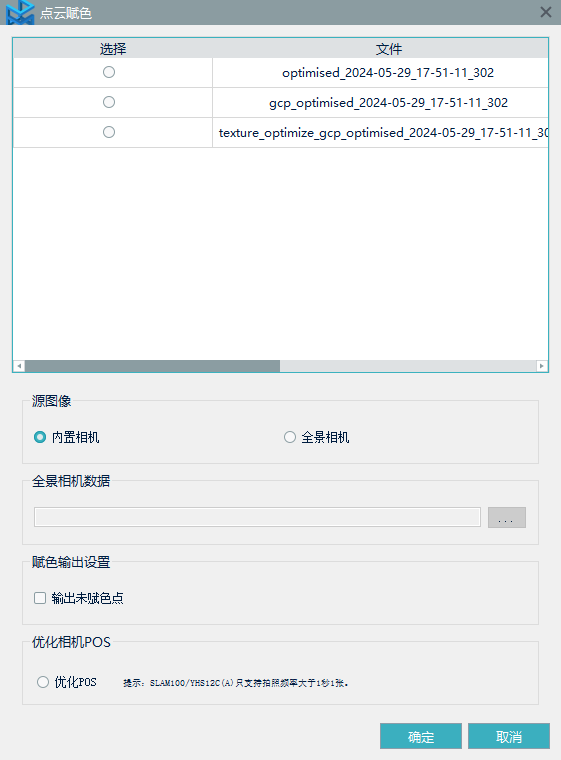
点云赋色
¶ 全景图生成
输出全景图拼接成果。
¶ 去除噪声
通过统计学算法,对点云文件中的离散噪点进行过滤剔除。
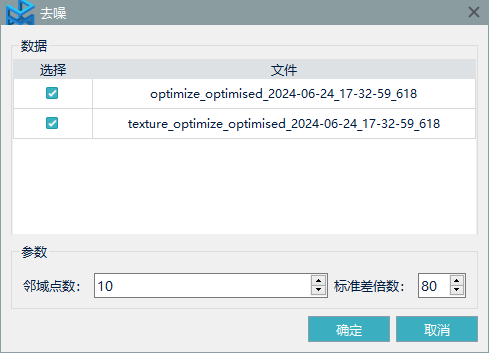
去除噪声
¶ 点云分幅
基于标准比例尺或者固定尺寸对所选点云文件进行分幅裁切输出。

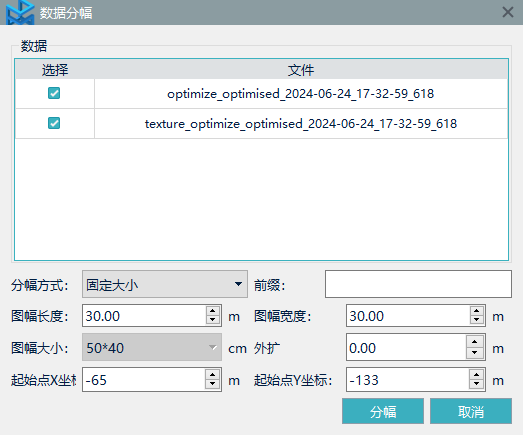
点云分幅
【比例尺】基于标准比例尺进行分幅
【固定大小】基于固定尺寸进行分幅
¶ 拼接转换
对两组有重叠区域的点云数据,通过在其重叠区域选取同名点的方式,将配准点云坐标转换至与基准点云所一致的过程。

拼接转换
【格网大小】采样间隔
【距离阈值】同名点之间的最大距离,匹配点大于该阈值时不参与计算
【迭代次数】ICP算法的迭代次数
【迭代距离】前后两次计算的距离的差值,如果小于这个值,则退出迭代
¶ 点云裁切
以导入的矢量文件为范围,对所选点云执行裁切导出。
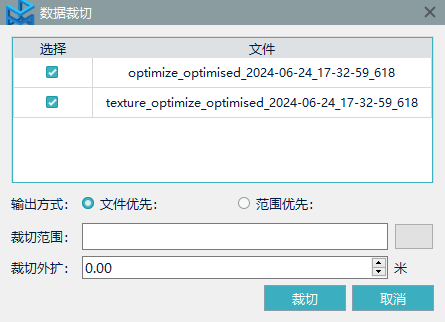
点云裁切
【文件优先】将所选点云文件与图形求交,一个点云文件会输出对应的多个图形裁切文件
【范围优先】按照图形数量与所有点云数据进行裁切
¶ RINRE格式转换
将原始观测文件转换为后差分解算所需的标准RINEX格式文件。
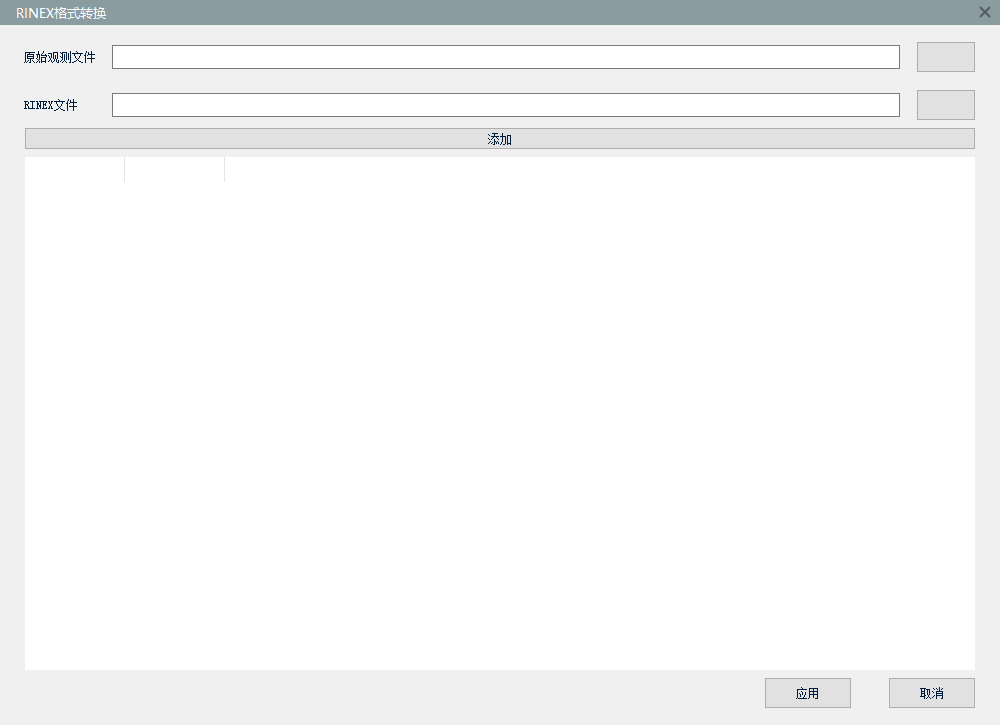
RINEX转换
¶ PPK解算
通过后处理方式解算一个周期内的历元数据,从而提高固定率,解算精度更高。
当扫描测区无网络,无法链接RTK时使用。
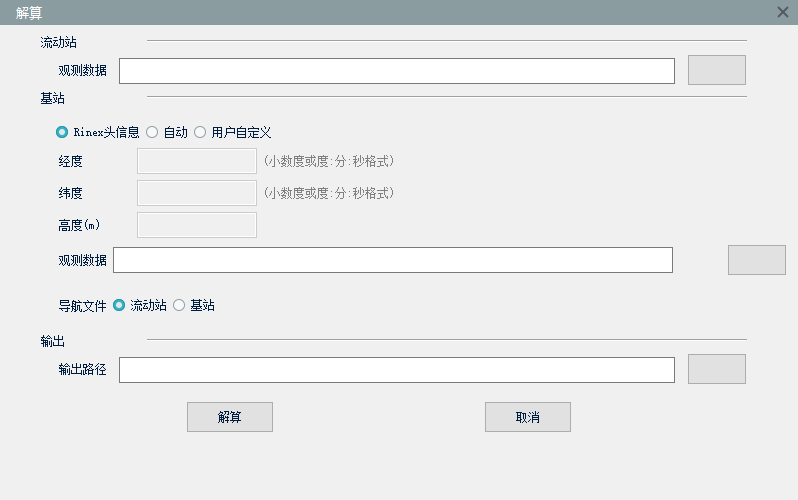
PPK解算
【观测数据】流动站观测数据所在路径
【Rinex头信息】基站点坐标读取Rinex头文件记录信息
【自动】自动计算基站点坐标
【用户自定义】用户输入基站点坐标
【经度】基站点坐标经度
【纬度】基站点坐标纬度
【高度】基站点坐标高度
【观测数据】基站观测数据所在路径
【流动站】导航文件使用流动站中记录信息
【基站】导航文件使用基站中记录信息
【输出路径】解算成果保存路径
¶ 精度报告
打开当前所激活工程中存在的定向精度报告。
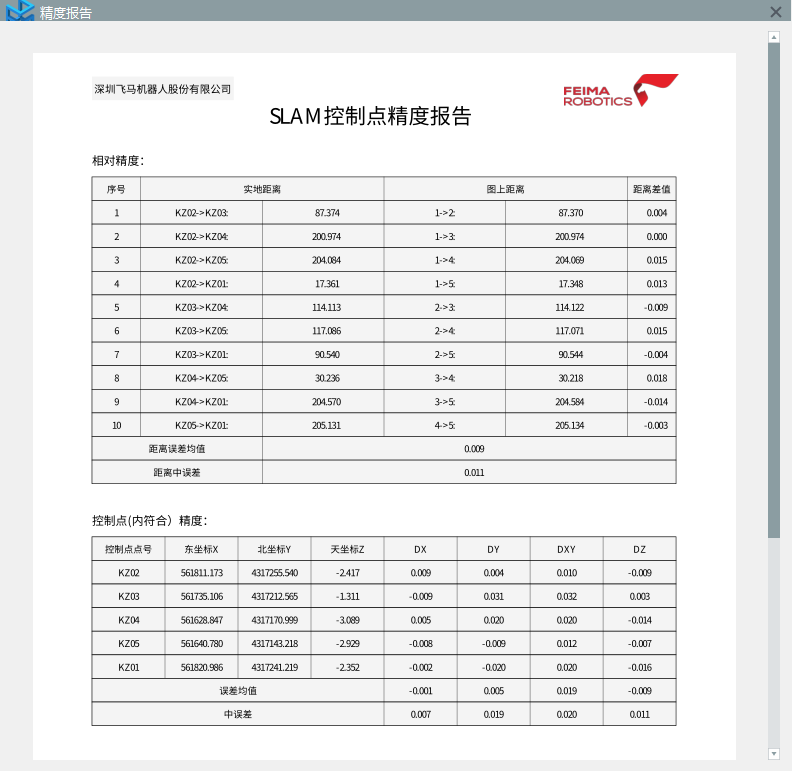
精度报告
¶ 取消处理
停止当前正在执行的处理步骤。
¶ 视图
¶ 渲染
将视图内点云以所选方式进行渲染显示。
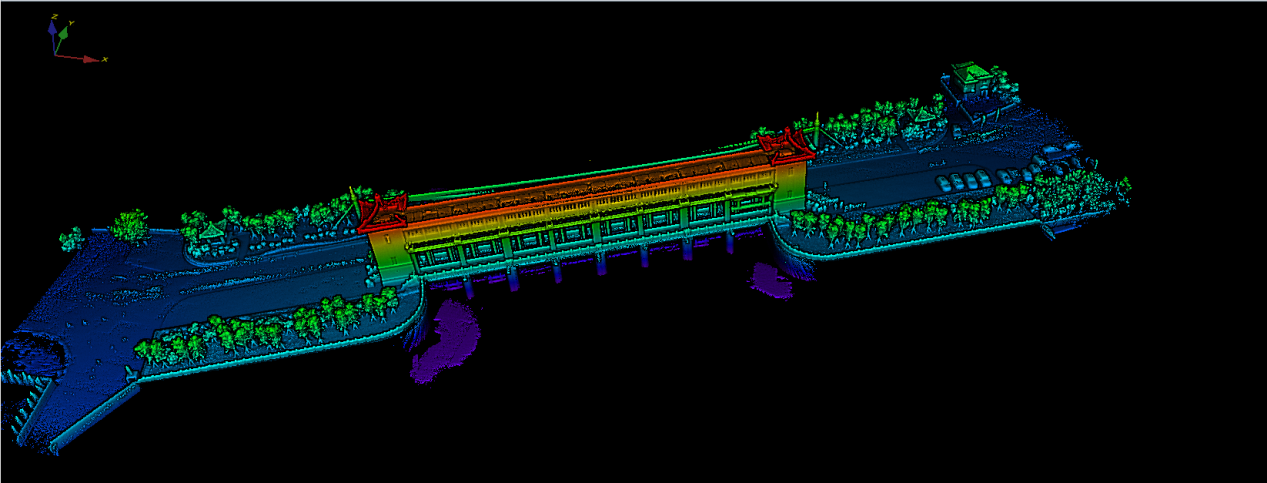
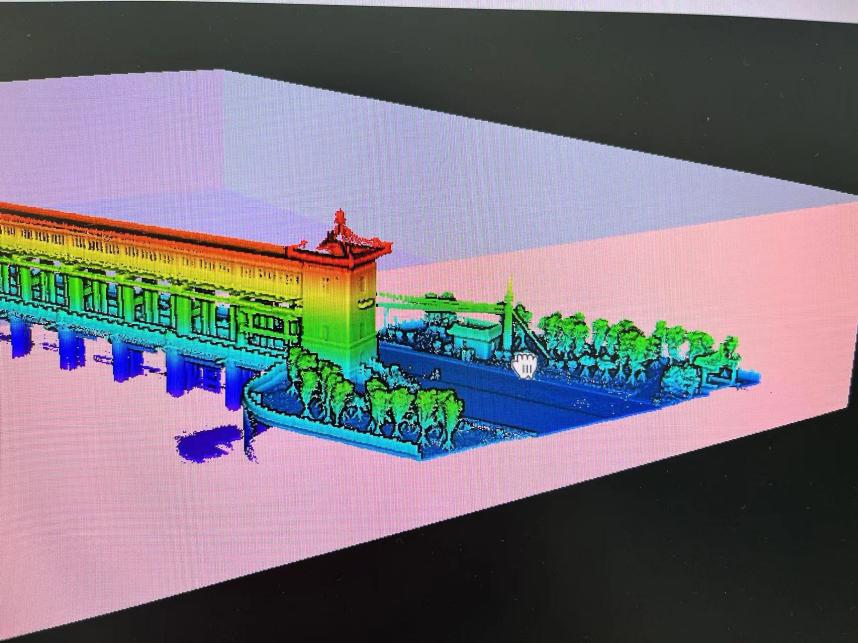
¶ 高程
对视图内点云以高程数值变化进行渲染显示。
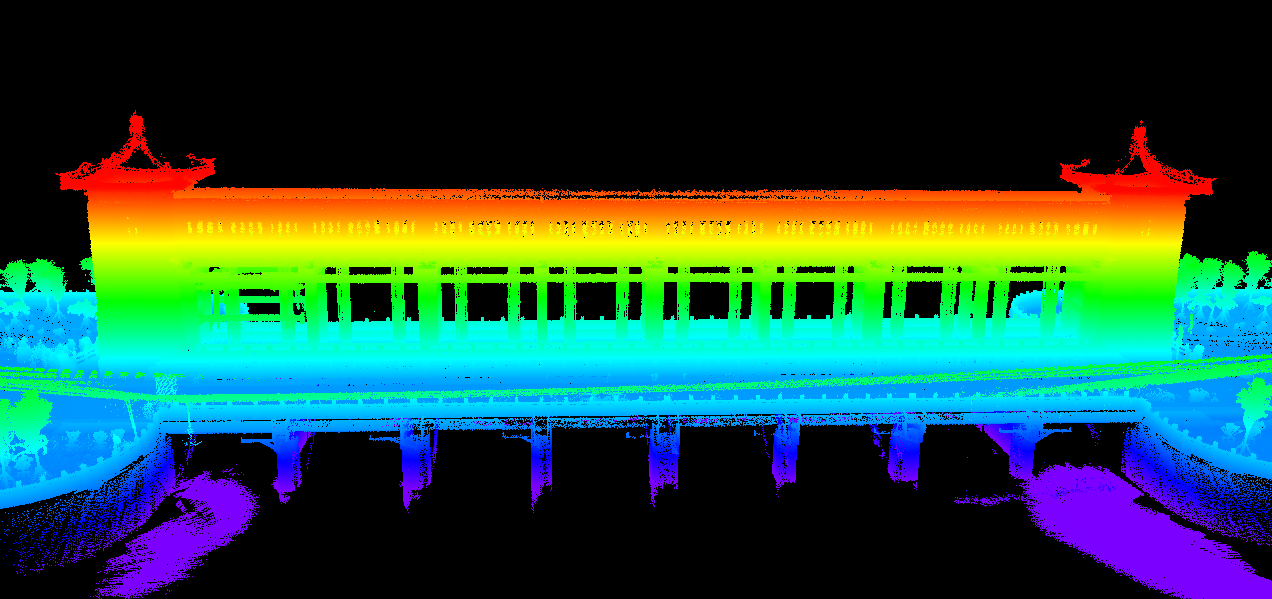
高程渲染
¶ 强度
对视图内点云以强度属性变化进行渲染显示。

强度渲染
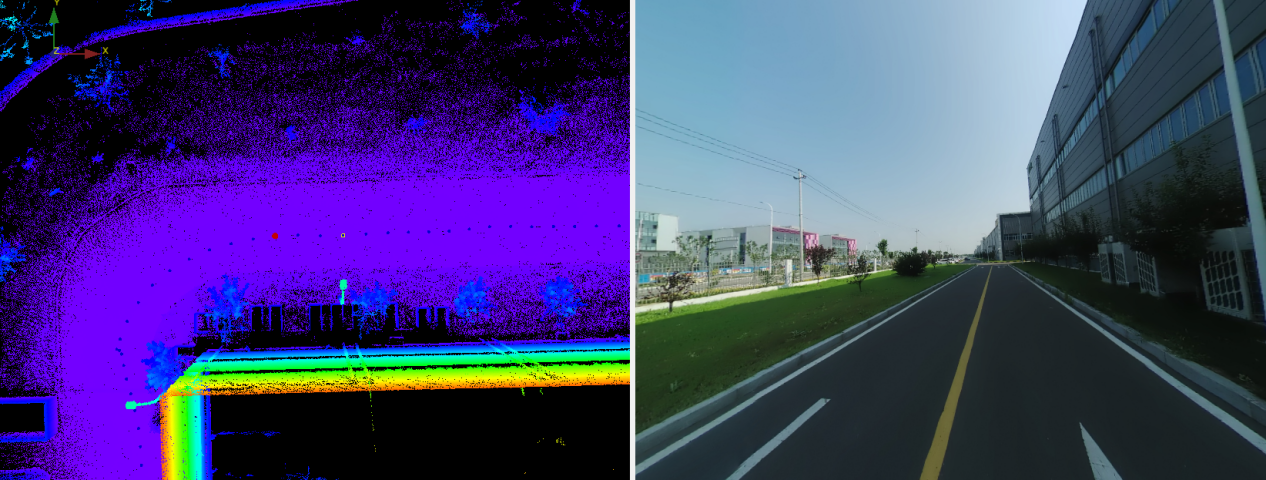
¶ 纹理渲染
对视图内点云以RGB颜色属性进行渲染显示,仅对赋色后点云生效。
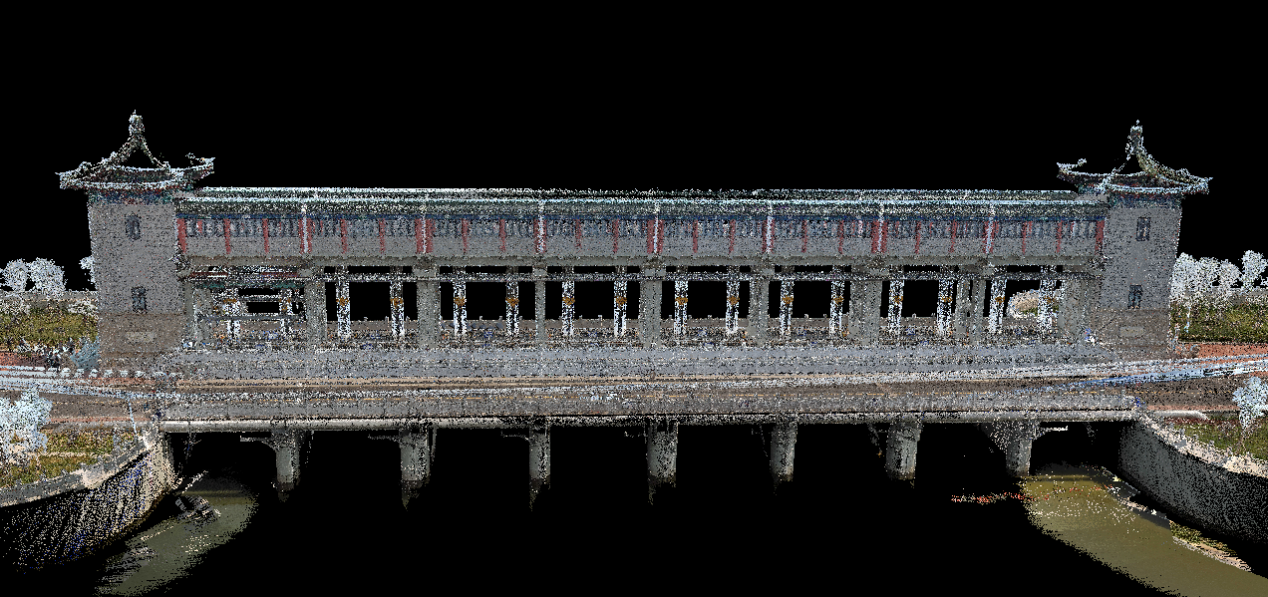
纹理渲染
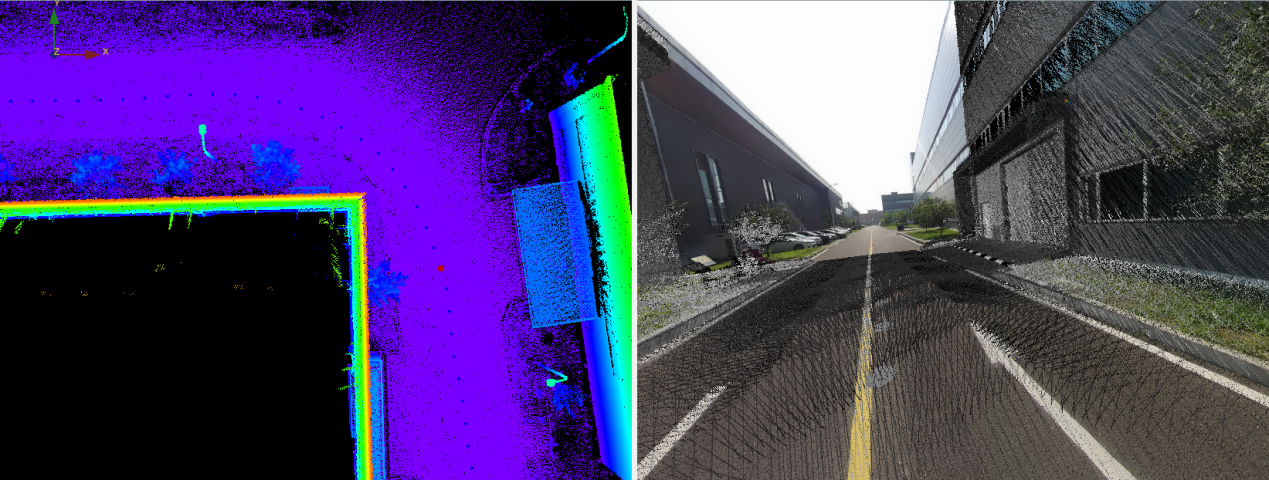
¶ 透视渲染
对视图内点云基于当前渲染方式(高程/强度/纹理)并叠加透视模式进行渲染显示。
纹理+透视渲染
¶ EDL
对视图内点云基于当前渲染方式(高程/强度/纹理)并叠加EDL模式进行渲染显示。
纹理+EDL渲染
¶ 自主漫游
基于采集路线,即里程计文件,对当前主视图加载的一组点云数据进行动态漫游展示。
¶ 画布
自定义视图窗口背景色。
修改画布颜色
¶ 视图
¶ 前视图
将主视图视角切换至前视图。
前视图
¶ 后视图
将主视图视角切换至后视图。

后视图
¶ 左视图
将主视图视角切换至左视图。
左视图
¶ 右视图
将主视图视角切换至右视图。
右视图
¶ 顶视图
将主视图视角切换至顶视图。
顶视图
¶ 底视图
将主视图视角切换至底视图。
底视图
¶ 正交投影
将主视图中当前点云显示为正交投影状态。
¶ 透视投影
将主视图点云状态转为透视投影状态。
¶ 数据管理
数据管理窗口中的功能均以选中标识行右键的方式进行显示、调用。
¶ 工程
对所选工程进行激活、编辑、导出等处理。
在数据管理窗口中,选中所建工程名称行,右键,即可调用相关功能。
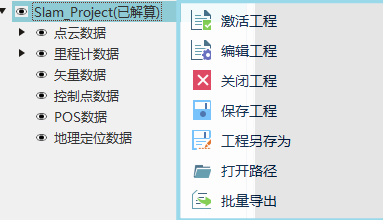
工程菜单
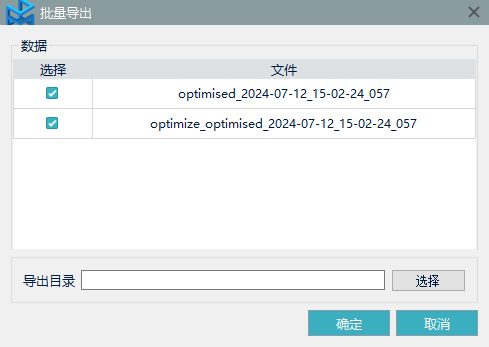
批量导出
¶ 点云数据
对所选点云数据执行视图添加、移除、显示/隐藏、导出等处理。
在数据管理窗口中,选中点云文件,右键,即可调用相关功能。
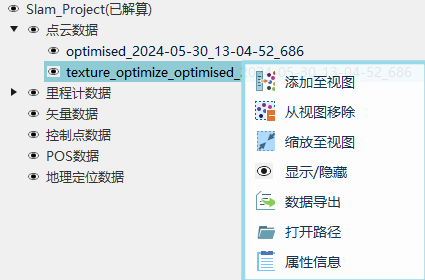
点云数据菜单
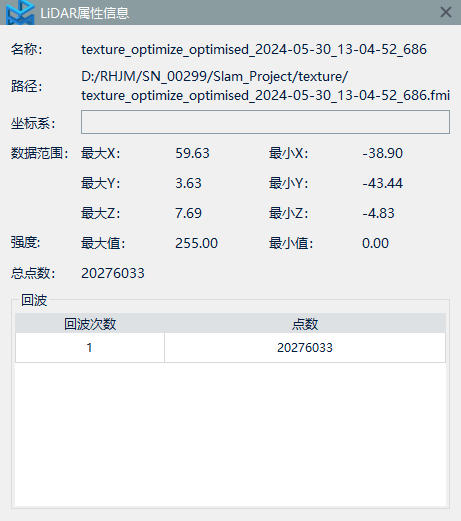
点云属性
¶ 里程计数据
对所选里程计数据执行视图添加、移除、显示/隐藏、导出等处理。
在数据管理窗口中,选中里程计文件,右键,即可调用相关功能。
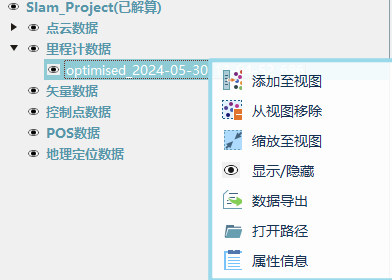
里程计功能菜单

里程计属性
¶ 矢量数据
功能当前暂未开放。
¶ 控制点数据
对所选控制点数据执行导入、编辑、显示等处理。
在数据管理窗口中,选中控制点数据行或控制点文件,右键,即可调用相关功能。
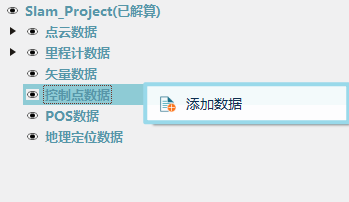
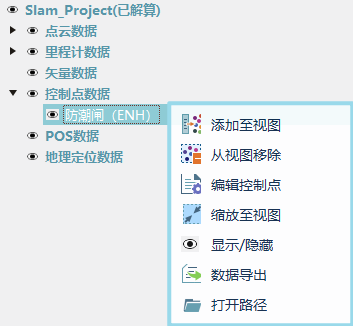
控制点功能菜单

导入控制点文件
- 坐标类型:选择控制点坐标系类型
【本地坐标】将导入控制点设置为本地坐标系
【投影坐标】将导入控制点设置为投影坐标
基准:选择控制点文件的椭球基准
坐标系统:选择控制点文件的投影坐标系统
确定:将控制点文件添加至
取消:取消控制点文件导入
添加至视图:将当前所选控制点添加至主视图显示
从视图移除:将当前所选控制点在视图中移除
编辑控制点:修改导入控制点文件的坐标系、对应关系等

控制点编辑
- 坐标系统:修改控制点坐标系统
【本地坐标】将导入控制点修改为本地坐标系
【投影坐标】将导入控制点修改为投影坐标
- 基准与投影
【基准】修改控制点文件的椭球基准
【投影类型】修改控制点文件的投影坐标系统
控制点名称:当前所选控制点点号
匹配点序号:当前所选控制点所对应的匹配点点号,支持修改(当默认顺序不匹配时)
检查点:将所选控制点设置为检查点,不参与控制,仅作为精度检核,前提是该点必须有相对应的匹配点
匹配:根据控制点相对位置关系,自动为其调整对应的匹配点
修改:保存修改的对应关系
撤销:操作回退
重置:回到本次进入控制点编辑的初始状态
应用:保存当前修改,并退出控制点编辑
取消:取消控制点编辑界面中所做的修改,并退出界面
缩放至视图:将当前所选控制点在视图中居中显示
显示/隐藏:显示/隐藏当前所选控制点(控制点已添加至视图显示后生效)
数据导出:将当前所选控制点导出为文本文件(*.txt)
打开路径:打开当前所选控制点文件的保存路径
¶ POS数据
对所选POS数据执行视图添加、移除、显示/隐藏、导出等处理。
在数据管理窗口中,选中POS文件,右键,即可调用相关功能。
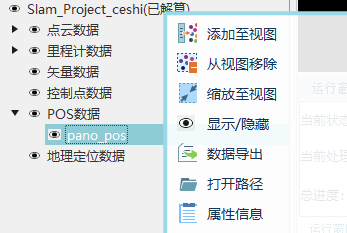
POS数据菜单

POS数据属性
¶ 地理定位数据
对所选地理定位数据执行视图添加、移除处理。
在数据管理窗口中,选中地理定位数据,右键,即可调用相关功能。
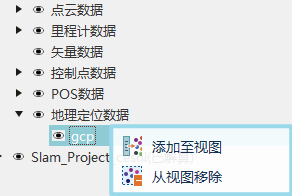
地理定位数据菜单
¶ 快捷工具
¶ 浏览工具

- 放大

:将视图内文件放大显示
- 缩小

:将视图内文件缩小显示
- 平移

:启动平移功能,此时鼠标左键为平移功能,按住左键即可移动视图内数据
- 全图

:将视图内全部数据居中显示
- 旋转

:启动旋转功能,此时鼠标左键为旋转功能,按住鼠标左键旋转,即可对视图内数据执行旋转浏览
- 设置中心

:设置旋转中心点
- 2/3D

:对视图进行二维、三维显示切换
¶ 测量工具

测量工具
- 选点

:激活选点功能,在视图中选择点位,可显示其属性信息
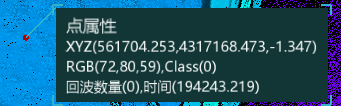
点位测量

:测量所选两点间的空间距离
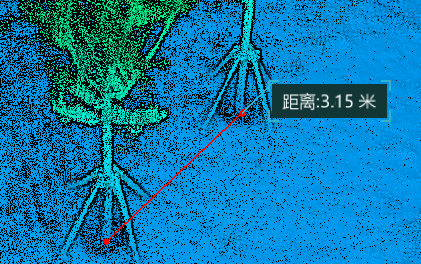
距离测量

:测量两点间的三维坐标的差值
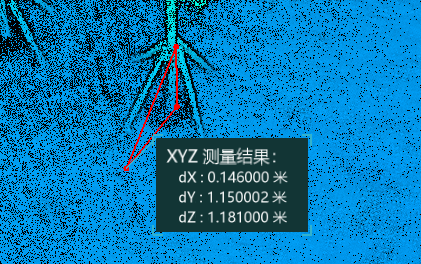
空间测量

:测量所选两点构成的直线与水平方向之间的夹角,绘制终点为所测量角的顶点
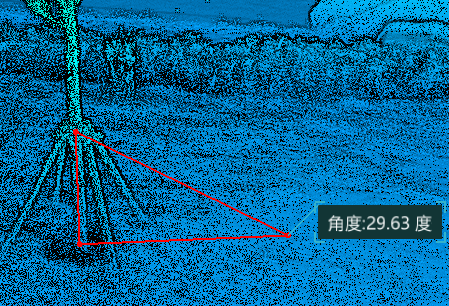
角度测量

:测量所绘制闭合区间的面积,左键点击绘制,双击结束绘制
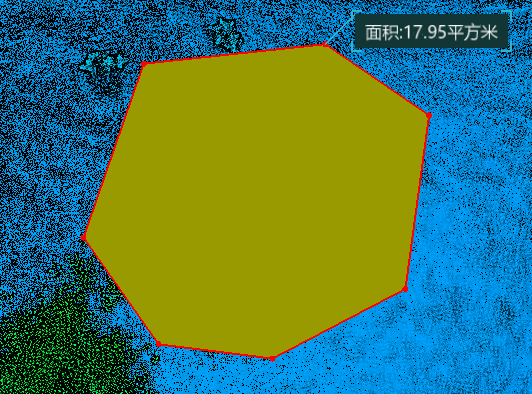
面积测量
¶ 剖面

对主视图中加载点云进行剖面绘制显示。
以鼠标绘制两点,确定方向,第三点确认宽度的方式进行绘制,剖面图自动显示在第二窗口中。
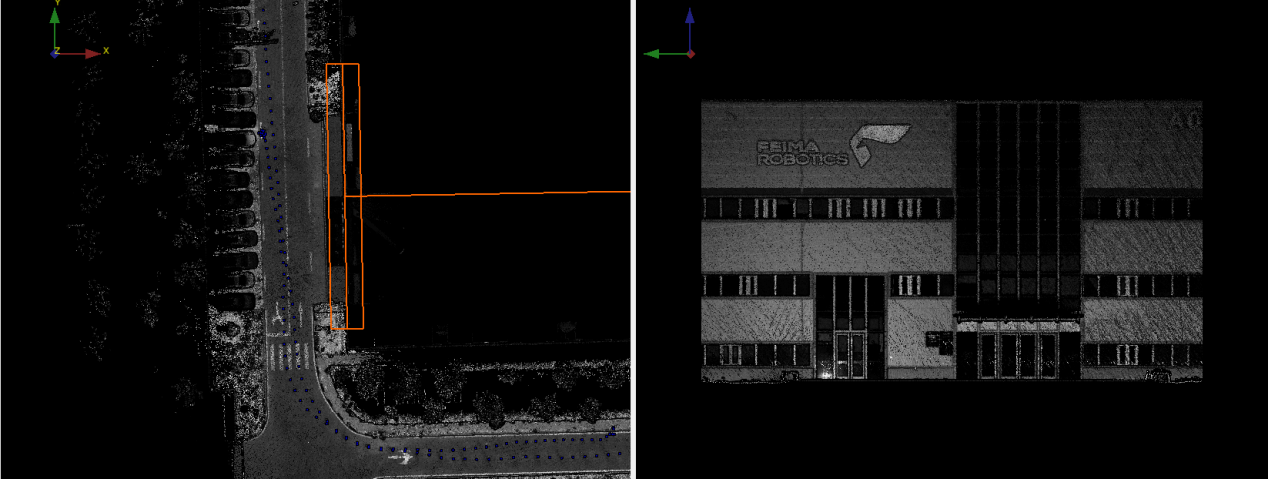
剖面显示
¶ 裁切

对主视图中显示点云进行X、Y、Z三个方向的裁切显示,便于查看点云内部结构或局部感兴趣区域。
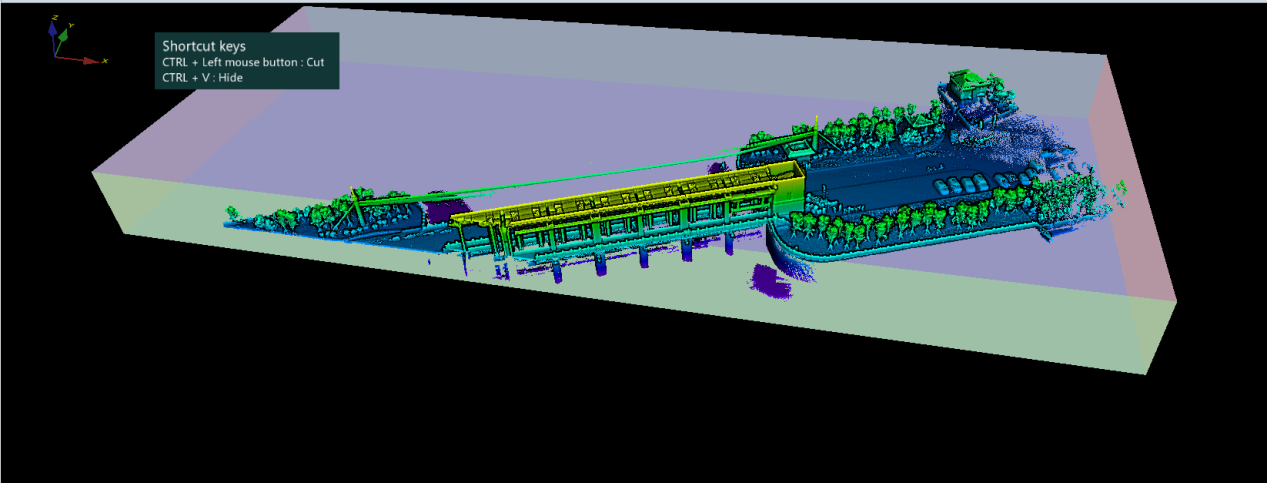
裁切显示
功能快捷键如下:
裁切:Ctrl+鼠标左键,当图标变为

时,前后推动所选面,即可进行裁切显示
裁切
隐藏/显示裁剪框:Ctrl+V
¶ 全景图

显示当前工程中生成的全景成果。
在已解算点云,并生成全景图的前提下,启动全景图功能,通过拾取POS点,双击显示该点位所对应的全景图。
全景图显示
界面中,POS点位默认显示为蓝色,捕捉到的POS点位显示为黄色矩形框,双击打开对应点位的全景图,已打开的全景图其对应的POS显示为红色点位。
¶ 全景图叠加点云

该功能当前仅支持SLAM100配备S-PANO100全景模块时生效。
在已解算点云,并生成全景图的前提下,将点云文件与POS文件添加至视图,通过全景图功能启动。
此时,打开全景图,软件会自动开启该功能,并在全景图视图中显示其所对应的点云数据。
全景图叠加点云显示
¶ 距离量测

该功能为全景图视图下的量测功能。当全景图与点云叠加显示时,可对其进行量测分析,其余状态下,该功能不可用。
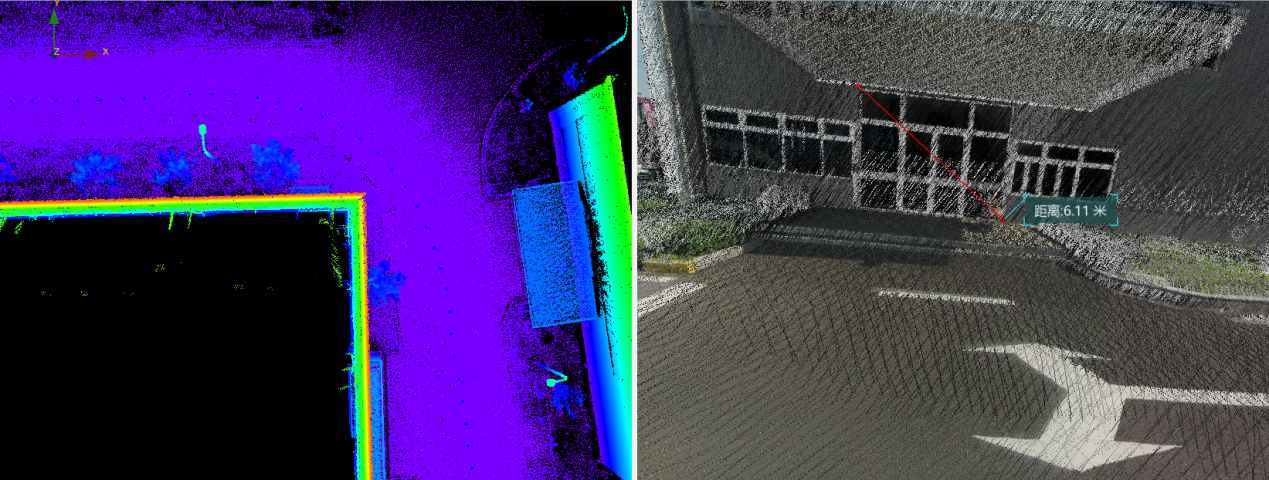
全景视图测量
¶ 点云大小

修改当前视图内点云数据的点大小。
修改点大小
¶ 视频

打开当前SLAM2000工程中,设备自身镜头所拍摄的视频,并将点云与其联动显示。
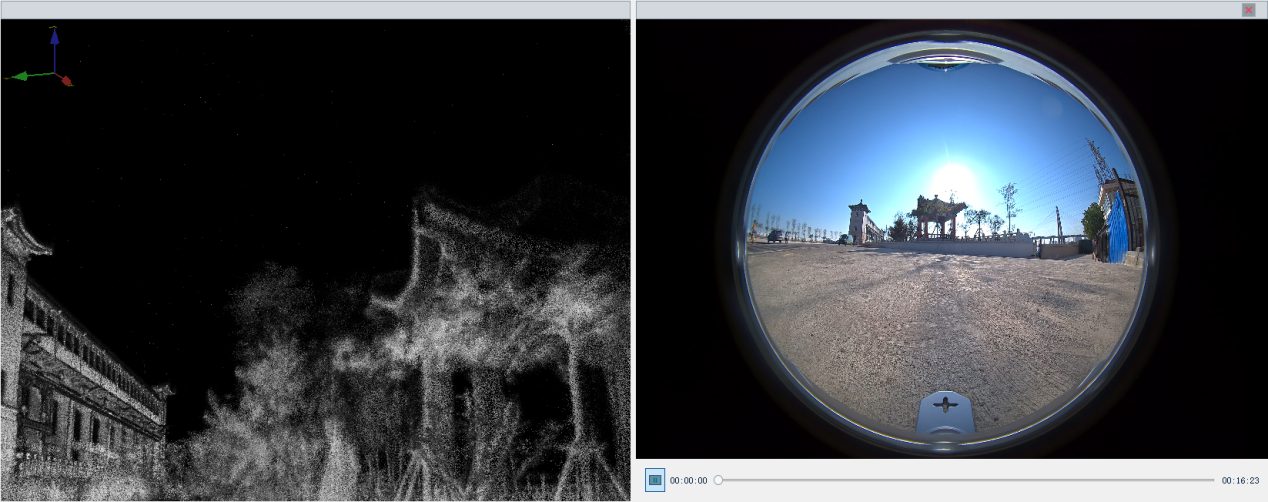
视频浏览
¶ 软件快捷键
¶ 点云浏览窗口
点云浏览窗口快捷键功能如下:
¶ 数据文件目录
¶ 原始数据文件
对SLAM产品系列原始文件格式做出如下说明,其中是否为必要性仅针对于数据解算方向进行评估。
¶ SLAM100
SLAM100原始数据目录结构:
├── camera0 0号相机影像存储目录 必要数据
├── camera1 1号相机影像存储目录 必要数据
├── camera2 2号相机影像存储目录 必要数据
├── 240301-024859_00266IMU_DATA_0001.txt IMU原始记录文件 必要数据
├── 240301-024859_00266_RASTER_DATA_0001.txt 光栅原始记录文件 必要数据
├── 240301-024859_00266_SLAM_Pandar_0001_0.pcap 激光原始记录文件 必要数据
└── feima_slam100_calib.yaml 设备标定文件 必要数据
¶ SLAM2000
SLAM2000原始数据目录结构:
├── 20240718-130226_Ec_Data.fmraster 光栅原始记录文件 必要数据
├── 20240718-130226_Hp_Imu.fmimr 高精度IMU原始记录文件 必要数据
├── 20240718-130226_Lidar_Data.fmlidar 激光原始记录文件 必要数据
├── 20240718-130226_Lidar_Imu.imu 激光雷达自身IMU记录文件 必要数据
├── 20240718-130226_Lp_Imu.fmimr 低精度IMU记录文件 必要数据
├── COLOR_CAM 鱼眼相机数据文件夹 必要数据
├── Description_File.txt 描述文件 必要数据
├── slam_calib.yaml 设备标定文件 必要数据
├── REAL_SLAM 实时点云成果文件夹 非必要数据,且占用体积较大,只做后处理可以不拷贝
└── OPTICAL_CAM 视觉相机数据文件夹 非必要数据,且占用体积较大,只做后处理可以不拷贝
¶ SRTK100
SRTK100原始数据目录结构:
├── Firmware 固件? 非必要数据
├── Log 设备日志 非必要数据
├── Nav 实时差分轨迹文件,即RTK轨迹文件 必要数据
├── Ppp 后差分 非必要数据
├── Raw 原始数据? 非必要数据
├── Rtcm 协议? 非必要数据
└── System 系统? 非必要数据
¶ S-PANO100
S-PANO100全景相机原始数据目录结构:
├── config 原始数据包 非必要数据
├── Log 相机调试日志 非必要数据
├── pano 机内拼接拍照和录像数据 非必要数据
├── src 机外拼接拍照数据 必要数据
└── updata 更新包 非必要数据
¶ 成果目录
¶ 成果文件夹
成果目录文件夹结构说明:
├── clip 点云裁切输出目录
├── denoise 点云去噪输出目录
├── dimages 去畸变影响输出目录
├── filter 行人滤波输出目录
├── frames SLAM2000鱼眼相机视频提取的照片输出目录
├── gcp 定向点云输出目录
├── log 处理日志输出目录
├── odometer 里程计输出目录
├── optimizer 优化点云输出目录
├── pano 全景图输出目录(SLAM100内置相机拼接结果)
├── pos 影像(dimages文件夹内)POS输出目录
├── register 拼接转换输出目录
├── sudiv 点云分幅输出目录
├── temp 临时数据输出目录,含原始建图点云
├── texture 点云赋色输出目录
└── *.sprj 工程文件
¶ 文本文件格式说明
对SLAM数据解算过程中产生的文本文件格式做出如下说明。
¶ 影像POS文件
对工程目录下POS文件夹内文本文件格式做出如下说明:
camera_pos.txt
camera_pos_opk.txt
¶ 全景POS文件
对工程目录下pano文件夹内文本文件格式做出如下说明:
pano_pos.txt
¶ 里程计文件
对工程目录下odometer文件夹内文本文件格式做出如下说明:
HF_odometry.txt