¶ 一、概述
Insta360全景影像以其360度无死角、千万级像素的表现能力,能够更真实地还原现场,为视觉应用提供了更好的数据载体。飞马机器人推出手持激光扫描仪包括SLAM100/SLAM2000/SLAM200/SLAM1000+第三方全景相机新组合,融合两者优势,实现测绘级精度+真实逼真的现场还原。
手持激光扫描仪+第三方全景相机新组合,在高清晰度要求的场景中,提供了更高效、更低成本的技术方案。该方案非常适用于交通事故现场还原、古建筑保护、精准点云标注、智慧文旅、数字工厂等场景。
目前SLAM100/SLAM2000/SLAM200/SLAM1000已经完成Insta360三款相机适配,包括ONE
RS 1英寸全景、X4和X5,如下图所示。


SLAM100/SLAM2000/SLAM200/SLAM1000使用不同的支架;每个支架都适配ONE
RS、X4和X5相机。其中,部分支架在固定螺丝处增加垫片,以提高设备安装时的稳固性。
¶ 二、作业流程
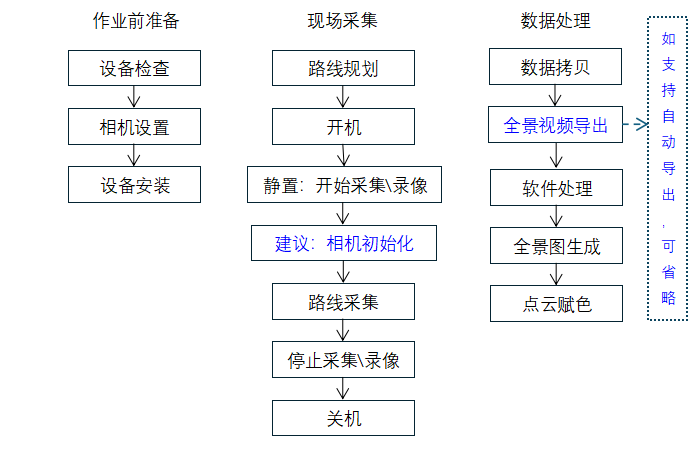
¶ 三、作业前准备
¶ 设备检查
作业前检查设备完整性、状态,检查项如下表:
|
设备 |
检查项 |
检查说明 |
|
SLAM100 SLAM2000 SLAM200 SLAM1000 |
主机 | 外观无损、上电检查、固件最新 |
| 电池 | 外观无损、满电 | |
| 底座 | 外观无损 | |
| 充电器\线 | 外观无损 | |
| 航插线 | 外观无损 | |
|
S-RTK |
主机 | 外观无损 |
| 天线延长杆 | 外观无损 | |
| 背夹(薄) | 外观无损 | |
| 背夹螺丝\L型螺丝刀 | 外观无损 | |
| TF卡 | 外观无损、存储空间 | |
| Sim卡 | 外观无损 | |
| TF读卡器 | 外观无损 | |
|
Insta360相机 |
主机(镜头、相机、电池) | 外观无损、满电、TF卡清空 |
| 支架 | 外观无损 | |
| 支架螺丝(一大四小) | 外观无损 |
¶ 相机设置
相机参数设置,设置后自动保存状态,后续如果没有修改不需要再设置,开始采集时再次确认即可,如参数不对,重新设置即可。下面分别说明ONE
RS、X4和X5的设置方法。
¶ (1) 模式设置
¶ ONE RS设置:
待机界面下,向右滑屏,选择【普通录像】或【移动延时】模式,推荐使用【移动延时】模式,如下图,选择后自动退出到待机界面。


待机界面下,点击拍摄参数提示,弹出拍摄参数设置,选择「6K,30」如下图。

设置完成后,界面显示如下,分别为【普通录像】或【移动延时】模式。


¶ X4/X5设置:
待机页面下,点按「菜单」按键,选择【录像】或【移动延时】模式。推荐使用【移动延时】模式。
【录像】具体设置:

待机页面下,向上滑动进入拍摄参数设置页面,选择「5.7K,30」,【录像】模式暂不支持更高分辨率(如8K等)数据处理,如下图。


【移动延时】具体设置:左右滑动选择为「移动延时」模式。

待机页面下,向上滑动进入拍摄参数设置页面,选择「5.7K,30,10X」,【移动延时】模式支持更高分辨率「8K,30,10X」,如下图。



¶ (2) 格式化卡(非必须)
请保证机身存储容量足够,避免采集的时候容量不够。
¶ ONE RS设置:
待机界面下,向下滑屏,点击 设置,选择 SD卡,可以进行格式化,如下图。


¶ X4/X5设置:
待机界面下,向下滑屏,向右翻页,点击 设置,选择
SD卡,可以进行格式化,如下图


¶ (3) 语音控制功能开启(X4/X5)
X4/X5相机支持语音控制,可减少按键操作,也可避免设备位移,建议使用语音控制。
语音功能开启方法,待机界面下滑屏幕,点击「语音控制」项,进入后设置「打开」并选择「中文」,如下图所示。


语音控制命令词,如下图所示,常用的「开始录像」、「停止录像」。

¶ 设备安装
设备检查通过后,进行设备安装。
SLAM100\SLAM2000+Insta360可以单独使用,也可以搭载S-RTK100、S-PACK200背包使用,下面分别介绍各种情况的设备安装。
SLAM100\SLAM2000\SLAM200\SLAM1000+Insta360的安装,使用各自的支架分别用螺丝固定相机、SLAM主机,如下图,依次为SLAM100\SLAM2000\SLAM200\SLAM1000设备。




注意:
1、不论使用SLAM100、SLAM2000、SLAM200、SLAM1000,相机朝向必须正确,否则数据不可用:
ONE RS有「1-INCH」字样 和 电源按钮 的一面 必须超前;
X4/X5电源按钮一面 必须朝前,如下图。


2、X4/X5的自带背夹不要使用,可能与设备安装支架不兼容,影响安装的稳固性,自带背夹如下图。

装配S-RTK、S-PACK200时,需要使用对应的背夹安装,如下图所示。


¶ 四、现场采集
¶ 路线规划
现场根据测区情况,规划现场采集路线,选定开始采集点。
¶ 采集作业
a) 将SLAM100\SLAM2000\SLAM200\SLAM1000平稳放置在开始点,按顺序开机SLAM100\SLAM2000\SLAM200\SLAM1000、Insta360,两者开机时间间隔小于5秒,并尽量缩短。
b) 按顺序Slam Go App中点击「开始采集」,点击Insta360的记录按钮,建议使用语音控制命令「开始录像」。按Slam Go App的提示时间完成静置。


ONE RS相机指示灯说明如下表所示
| 相机状态 | 相机指示灯状态 |
| 开机中 | 蓝色长亮 |
| 待机 | 青色长亮 |
| 关机充电中 | 红色长亮 |
| 关机充满电 | 熄灭 |
| 录像中 | 红色闪烁 |
| U 盘模式 | 蓝色闪烁 |
| 固件升级中 | 蓝色长亮 |
| 存储异常 | 蓝色慢闪 |
X4\X5相机指示灯说明如下表所示
| 相机状态 | 指示灯状态 |
| 开机 待机/待机充电/待机充满电 预录中/U盘模式 |
青灯常亮 |
| 触发开机 | 青灯闪3次 |
| 触发关机 | 青灯闪5次 |
| 关机充电 | 红灯常亮,满电后指示灯熄灭 |
| 录像中 | 红灯闪烁 |
| 固件升级 | 蓝灯慢闪 |
| 存储异常(卡满) 写卡/USB异常 |
黄灯常亮 |
| 无存储卡 | 黄灯闪烁 |
| 电量过低 | 黄灯每5秒快闪3次 |
| 高低温预警 | 黄灯快闪3次 |
| 反向充电/快传 | 绿灯闪烁 |
c) 静置完成后,从设备正后方,用右手拿起设备,右手持设备左右晃动一次,保证相机更好的完成初始化。(设备姿态与位置需要有明显的变化,右手持设备是为了右侧的基准相机遮挡更少,采集员不出现在右侧相机照片内,应站在设备左侧,有助于设备处理算法初始化)。
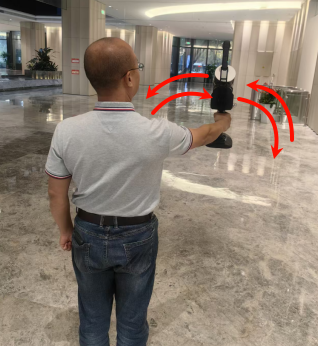
d) 1分钟后,如果右手换左手时,应缓慢交换。采集行走时,采集员尽量不要出现在采集视频中,应站在设备后方或者斜后方,如下图所示。

e) 按规划路线完成采集后,在结束点按顺序Slam Go App中点击「结束采集」,短按Insta360的记录按钮,停止录像,建议使用语音控制命令「停止录像」。


f) 顺序关机SLAM100\SLAM2000\SLAM200\SLAM1000和Insta360设备。
采集过程注意事项:
除了采集员外,附近尽量不要有其他动态物体,尤其是大量走动的人员;
采集过程中能直线扫描的尽量走直线;
涉及到转弯时,保持设备平稳且缓慢的转弯,避免大幅度视角转动。
行走路线应平行建筑物墙面走,不要室内室外频繁穿插,不要一会儿靠近建筑物一会儿又远离建筑物(S型曲线),如下图所示。

¶ 五、数据处理
¶ 数据拷贝
a) SLAM100\SLAM2000\SLAM200\SLAM1000原始数据 SN***文件夹拷贝到硬盘;
b) 拔出Insta360的TF卡或者USB连接线(X4\X5支持),将视频文件拷贝到电脑,如下图。


**注:**Camera01后面用到较多,请记住拷贝的位置,拷贝位置无要求,Camera01文件夹名称无要求。
ONE RS相机的一次采集的视频文件包括:一个 LRV文件和两个VID文件,三个文件都需要拷贝。
X4相机的一次采集的视频文件包括:一个 LRV文件和一个VID文件,两个文件都需要拷贝,如下图。

注:X4\X5相机录像每30分钟新建一组LRV和VID文件,如果录像时间大于30分钟时,这些LRV和VID文件都需要拷贝出来,如下图。
- 全景图导出
针对SLAMGOPOST 2.4.1.0以上版本,请直接跳过该步骤,但当录像时间大于30分钟时(即存储多个insv文件时),仍需要进行手动导出mp4并进行重命名,命名内容与首个insv文件保持一致。
在Insta360官网下载并安装Insta360 studio,打开Insta360 studio,单击打开文件,选择Camera01文件夹下 VID 开头的文件 打开即可。
注:ONE RS
相机VID开头的00是左相机文件,10是右相机文件,打开时选择任一即可。
X4/X5相机录像时间大于30分钟,导出全景图时,必须同时选中所有的VID文件拖入到Insta360studio(注意不可以一个一个拖入VID文件),这样导出即为一个mp4文件,加载VID后导出操作相同,操作如下。

[确认「FlowState防抖」是关闭状态,如下图所示。]

右键 开始导出,选择 导出全景视频 保存路径选择Camera01
文件夹,其他默认即可。


在Camera01文件夹下导出 mp4 文件,如下图。

¶ 软件处理
¶ 工程创建
Slam Go Post中新建工程,选择对应的设备类型及平台。

|
产品 |
平台选项 |
说明 |
|
SLAM100 |
手持 | 纯手持,包括:+Insta360的手持 |
| 手持RTK | 手持+RTK100 | |
| 手持RTK+Insta360 | 手持+Insta360+RTK100 | |
| Pack100 | Pack100 | |
| Pack100+Insta360 | —— | |
| 车载 | 车载支架 | |
| 用户自定义 | 自定义偏心距 | |
| Pack100+Pano100 | Pack100+Pano100相机 | |
|
SLAM2000 |
手持 |
纯手持,包括:+Insta360的手持 |
|
手持RTK |
手持+RTK100 |
|
|
手持RTK+Insta360 |
手持+Insta360+RTK100 |
|
|
Pack200 |
Pack200 |
|
|
Pack200+Insta360 |
Pack200+Insta360 |
|
|
静态 |
—— |
|
|
混合 |
静态站+移动 |
|
|
用户自定义 |
自定义偏心距 |
|
|
SLAM200 |
手持 |
纯手持,暂不包括Insta360 |
|
用户自定义 |
支持手持+Insta360 |
|
|
SLAM100 |
手持 |
纯手持,包括:+Insta360的手持 |
其他一键处理 与常规操作一致。
¶ 点云赋色
如果一键处理勾选「赋色点云」,必须勾选「全景图」,因为赋色依赖全景图,如下图所示。

「延时摄影模式」:如果全景相机采集时选用的【移动延时】模式,此选项需要勾选。
单步赋色前应完成「全景图生成」,如下图目录指定Camera01。


如果赋色前没有完成「全景图生成」则程序提示错误,如下图。

Slam Go Post中单击 「点云赋色」工具,选择「全景相机」,数据目录选择Camera01,如下图。

**注:**如果在 一键处理 中勾选了赋色,设置参数和单独赋色一致。
¶ 全景图生成
Slam Go Post中单击 全景图生成
工具,选择「外置全景相机」,数据目录选择Camera01,如下图。
